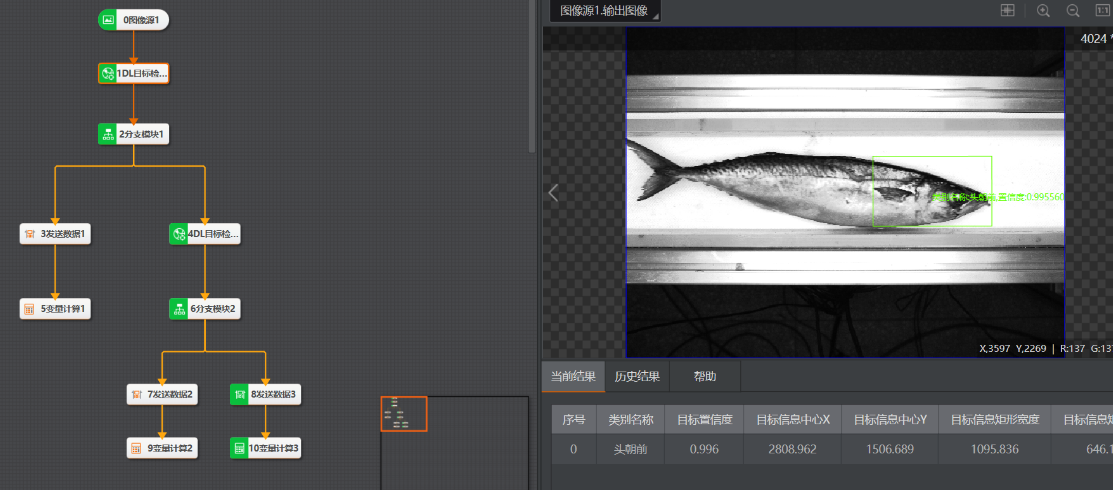
لا تتوقف ناقلة الأحزمة، وتقوم بتحديد اتجاه رأس السمكة وذيلها واتجاه ظهر السمكة أثناء الحركة.
شارك
أولاً. خلفية المشروع:
وصف الطلب:
1. ناقل الحزام لا يتوقف، التعرف الديناميكي على اتجاه رأس السمكة وذيلها وظهرها.
2. تصنيف الأشياء واختيار ما إذا كان سيتم التخلص منها.
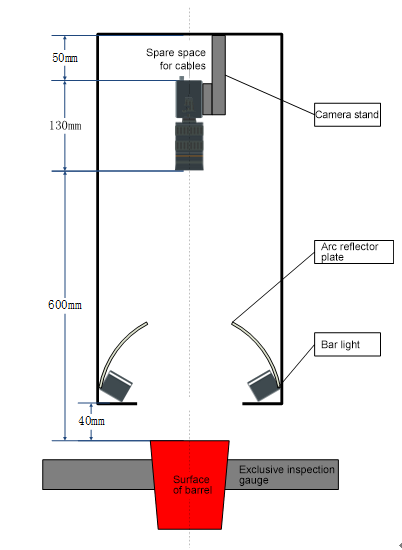
3. ناقل الحزام + معالجة آلية مستشعر ضوئي.
صعوبات المشروع والحلول:
عدد كبير من الصور، تدريب عميق للغاية.
ثانياً. معمارية الحل:
ثالثاً. مزايا البرنامج:
1. يتم بيع البرمجيات والأجهزة معًا (VisionMaster + VisionTrain).
2. بعد شهر من التنفيذ، يتم تطبيق VM بسرعة.
3. دقة النتائج 97%، ورضا العملاء مرتفع.