الصفحة الرئيسية > الحلول > 3C الإلكترونيات > خلل اهتزاز القرص 360 درجة القبض العشوائي
يتم توزيع المواد عبر القرص الاهتزازي، وتُفرز المواد التي تلبي المتطلبات أولاً باستخدام الرؤية، ثم يتم تحديد موقعها بصريًا.
شارك
1). خلفية المشروع:
وصف الطلب:
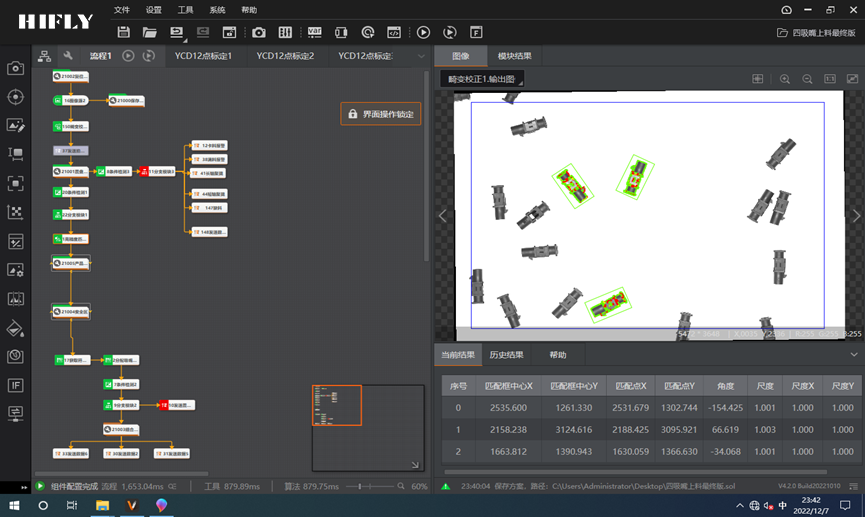
يستخدم المشروع منصة تطوير خوارزمية VM لتحقيق تحميل واسترداد مختلف المواد. يتم توزيع المواد عبر القرص الاهتزازي، ويتم فحص المواد التي تلبي المتطلبات أولاً باستخدام الرؤية، ثم يتم تحديد موقعها بصريًا. صعوبة المشروع تكمن في كيفية تحسين دقة الإمساك الكامل بزاوية 360 درجة للأجزاء الخاصة ذات الأشكال المتوافقة.
المتطلبات الفنية:
(1) تحقيق امتصاص منتج القرص الاهتزازي بدقة توجيهية ±0.25 مم
(2) تحديد اتجاه المادة وتمييز الاتجاهات اليسرى واليمنى
(3) يجب فرز اتجاه المادة العلوي والسُفلي، بحيث لا يمكن الإمساك بها إلا إذا كانت الجهة الصحيحة لأعلى
(4) تحتاج وظيفة المنطقة الآمنة إلى فرز المواد القريبة من القرص الاهتزازي
(5) يجب فرز الخليط، بحيث لا يمكن الإمساك بالمواد المختلفة
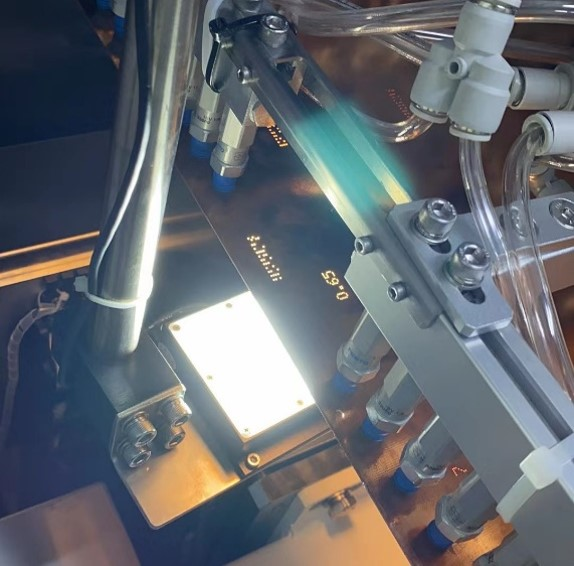
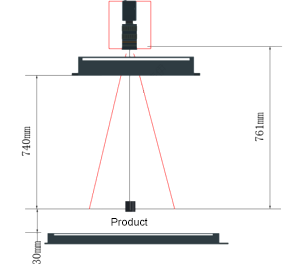
2). هيكل الحل:
الخطة تستخدم مصدر الضوء الأمامي والضوء الخلفي، وتطبع مخطط المادة، وتماشى مع العدسة FA لتلبية احتياجات المسافة العاملة الكبيرة والعمق البؤري الكبير.
3). مزايا البرنامج:
1. تم تحقيق وظيفة التغذية التلقائية للمكونات المتشكلة، ومعدل الإمساك الناقص أقل من 0.1%
2. أداء معالجة خوارزمية الصور المرئية VM جيد، وبالتعاون مع الذراع الروبوتية عالية السرعة للعميل لأخذ المواد، يمكن تحقيق متطلبات التغذية عالية السرعة بـ 7200 قطعة/ساعة
3. تطوير البرمجيات القياسية على منصة خوارزمية VM، لا حاجة للبرمجة المعقدة، ولا حاجة لمهندسي البرمجيات لإكمال بناء المشروع، مما يقلل من صعوبة التطوير وتكاليف الصيانة بعد البيع للشركات