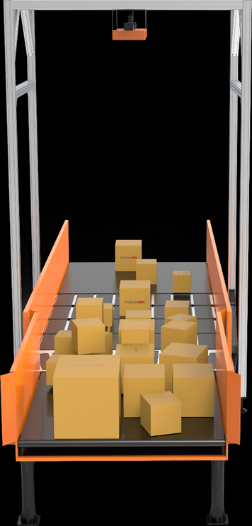
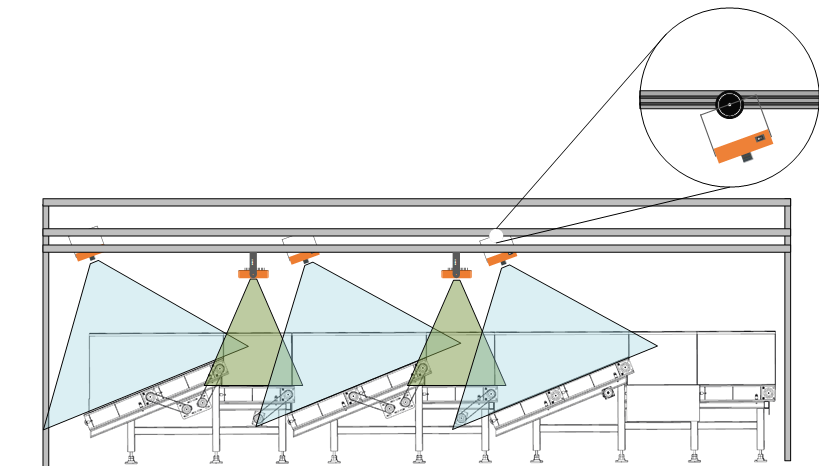
আইন্টিগ্রেটেড ডিপ লার্নিং কোর বিশিষ্ট RGB-D ইন্টেলিজেন্ট স্টেরিও ক্যামেরা রোবটের সাথে জোড়া লাগানো হয়েছে, এবং ডিপ লার্নিং অ্যালগরিদম এবং ট্রেডিশনাল ভিশন অ্যালগরিদমের আর্গানিক সংমিশ্রণের মাধ্যমে রোবটকে সবসময় কার্যকরভাবে ধরে নেওয়া হয়।
ভাগ করে নিন
1). প্রজেক্ট পটভূমি:
প্রয়োজন বর্ণনা:
১. হাতের ব্যবহার পরিবর্তে চক্ষুষ্ময় এবং বেল্ট নিয়ন্ত্রণ ব্যবহার করুন।
২. কার্টন, সফট ব্যাগ, স্নেকস্কিন ব্যাগ, এনভেলোপ এবং অন্যান্য ধরনের প্যাকেজের সাথে সpatible হতে হবে।
৩. প্যাকেজ পজিশনিং, সিপারেশন, ডি-স্ট্যাকিং ফাংশন পূরণ করতে হবে।
৪. নিশ্চিত করুন যে প্যাকেজগুলি স্ট্যাক বা অতিরিক্ত ভারে না হয়ে একটি একটি করে অতিক্রম করে।
তেকনিক্যাল প্রয়োজন:
১. প্যাকেজ উচ্চতা রেঞ্জ: ১০~৫০০মিমি।
২. রিয়েল-টাইম প্রসেসিং সময় ≤১০০মিলিসেক।
৩. সিপারেশন সফলতা হার > ৯৯%।
৪. সিস্টেম প্রসেসিং দক্ষতা > ৪০০০ টুকরা/ঘণ্টা।
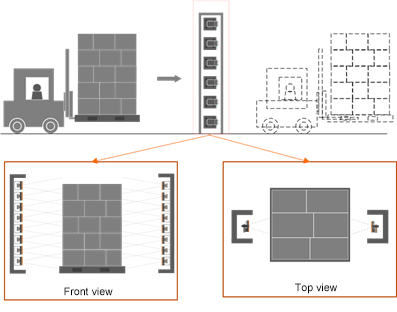
2). সমাধান আর্কিটেকচার:
উচ্চ খরচ, প্যাকেজ স্ট্যাকিং এবং নিম্ন দক্ষতা এই সমস্যাগুলির উদ্দেশ্যে, ক্লাইমিং ডিস্ট্যাকিং সিস্টেম রঙিন শিল্পীয় ক্যামেরা + উচ্চ-পারফরমেন্স হোস্ট সমাধান এবং উন্নত গভীর শিখান অ্যালগরিদম ব্যবহার করে বহুতি প্যাকেজ স্ট্যাকিং এবং বিভিন্ন জটিল পরিদृশ্যার জন্য সঠিক প্যাকেজ অবস্থান নির্ধারণ করে এবং তারপরে বেল্টকে আদেশ পালনের জন্য নিয়ন্ত্রণ করে। স্ট্যাকিং পর্বের পরে এটি একক পার্থক্য, দ্বিগুণ সংশোধন এবং বহু-পাশের পাঠ্য সহ মেলানো যেতে পারে যা স্বয়ংক্রিয় প্যাকেজ পড়া এবং সাজানোর জন্য সত্যিই কর্মচারী হ্রাস এবং দক্ষতা বৃদ্ধি করে।
3). প্রোগ্রামের সুবিধা:
১. বৈজ্ঞানিক পরিকল্পনা: স্ব-উন্নয়ন চালিত বুদ্ধিমান নিয়ন্ত্রণ পদ্ধতি, প্যাকেজ অপটিমাল নিয়ন্ত্রণ ব্যবস্থাপনা, স্ট্যাকড প্যাকেজের কার্যকর পৃথককরণ নিশ্চিত করে এবং পশ্চিমা ভুল ভাঙ্গা চাপ কমায়।
কর্মচারী কম এবং দক্ষতা বাড়ানো: প্রতি সেট চড়ানো এবং স্ট্যাকিং সিস্টেম ২ জন শ্রমিকের স্থান পরিবর্তন করে, সর্বোচ্চ দক্ষতা ঘণ্টায় আসন্ন ২০০০ টি হয়, যা ক্রস-বেল্ট ফুল সর্টিং দক্ষতার প্রয়োজন পূরণ করে।
৩. স্থিতিশীল এবং নির্ভরযোগ্য: গভীর শিখানা অ্যালগোরিদমের উপর ভিত্তি করে, এটি সফ ব্যাগ, কালো ব্যাগ এবং এনভেলোপের মতো জটিল প্যাকেজের ভয় পায় না এবং ঠিক ঠাক অবস্থান নির্দেশ করে।
৪. শক্তিশালী বিস্তার: ব্যাক-এন্ড একক পার্সেপশন, EDP, ছয়-পাশের পাঠ এবং অন্যান্য ইউনিভার্সাল যন্ত্রপাতি সংযোগ করতে পারে যা একটি সম্পূর্ণ ক্রস-টেপ স্বয়ংক্রিয় প্যাকেজ সমাধান সম্পন্ন করে।