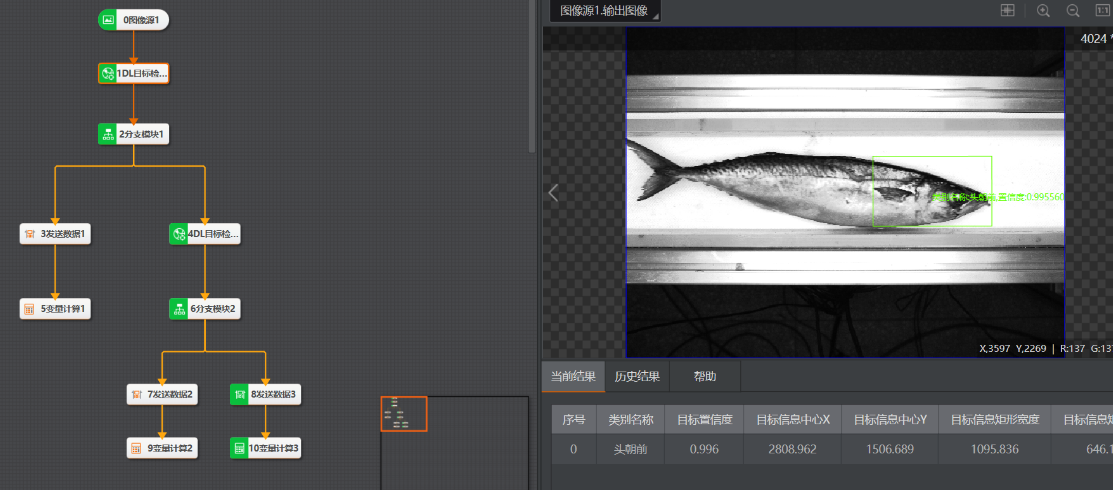
La banda transportadora no se detiene, identificación dinámica de la dirección de la cabeza y la cola del pescado, y la dirección de la espalda del pescado.
Compartir
i. Antecedentes del proyecto:
Descripción del requisito:
1. La banda transportadora no se detiene, identificación dinámica de la dirección de la cabeza y la cola del pescado, dirección de la espalda del pescado.
2. Clasificar objetos y decidir si desecharlos o no.
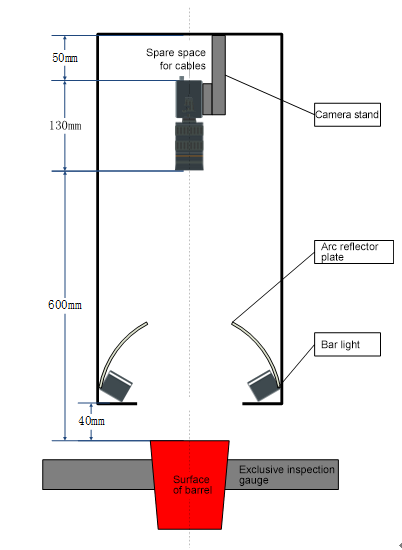
3. Banda transportadora + mecanismo de sensor fotoeléctrico.
Dificultades del proyecto y soluciones:
Gran cantidad de imágenes, mucho entrenamiento profundo.
iI. Arquitectura de la solución:
iII. Ventajas del programa:
1. El software y el hardware se venden juntos (VisionMaster + VisionTrain).
2. Después de 1 mes de implementación, el VM se aplica rápidamente.
3. La precisión de los resultados es del 97%, y la satisfacción del cliente es alta.