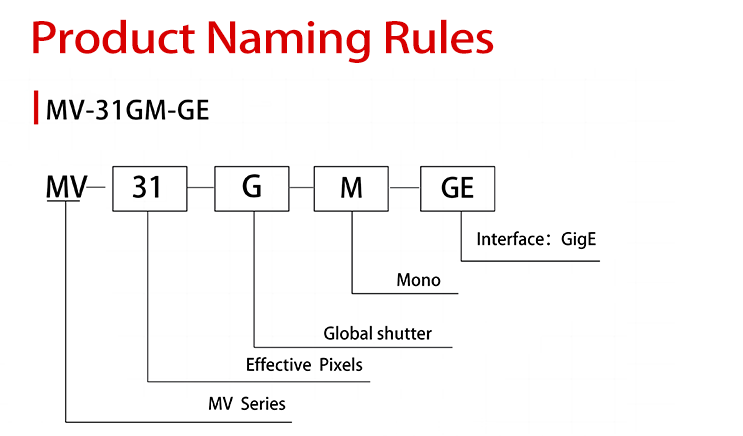
Page d'accueil / Produits / Caméra industrielle / Caméra de balayage de la zone / La caméra de balayage de la zone MV-134GC-GE/M

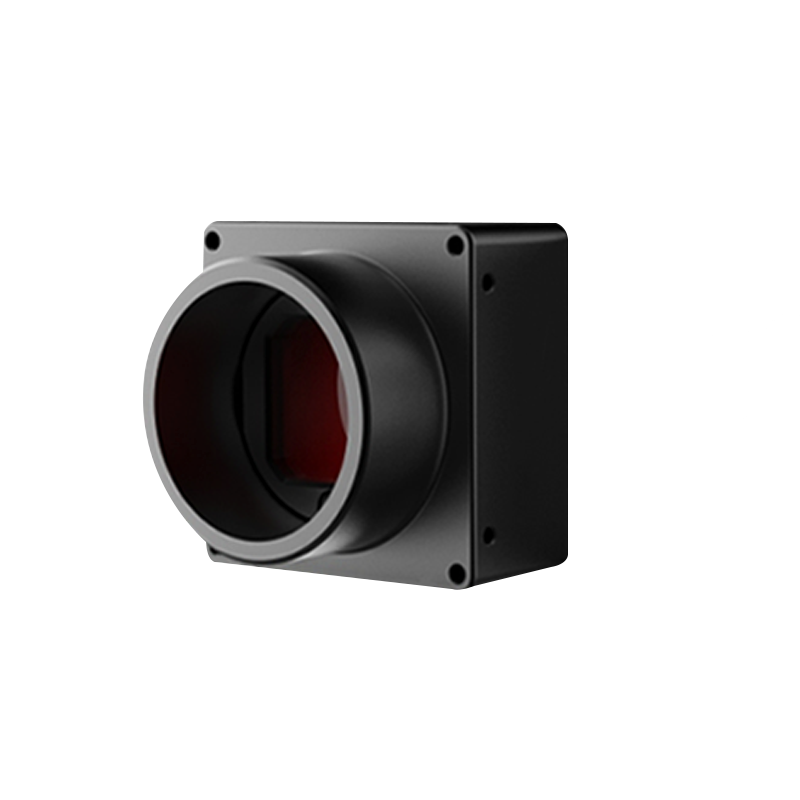
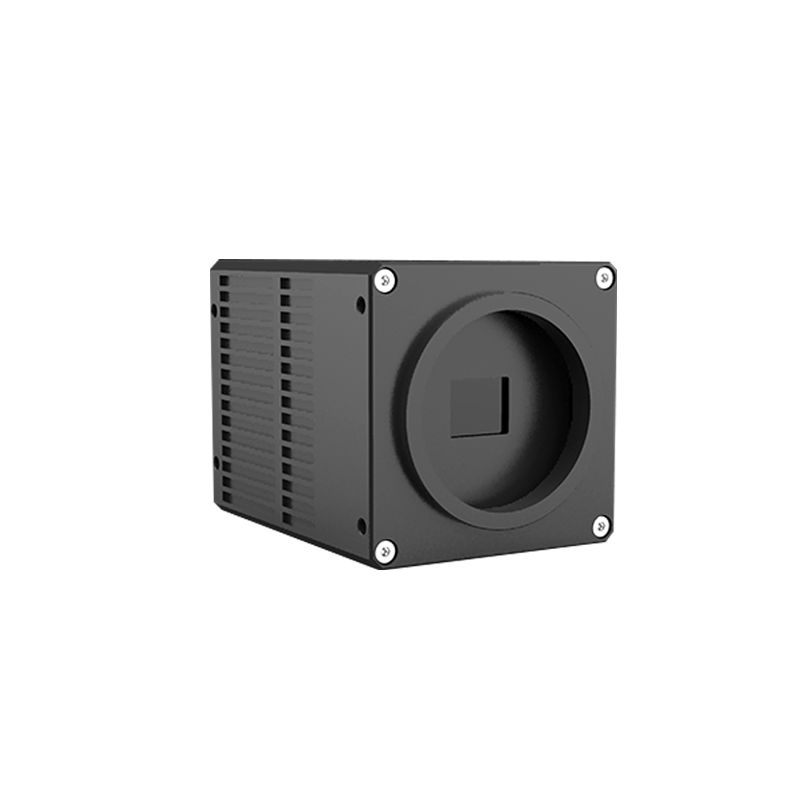
MV-134GC-GE/M Caméra industrielle Gige 1/2" 1,3MP 91IPS
|
Cette série de caméras de balayage de la zone GigE comprend la couleur et le mono Je suis désolé. Transmission longue distance jusqu'à 100 mètres. ● Le SDK est à brancher. ● Prise en charge de la sortie de données brutes de 12 bits. ● Plusieurs caméras fonctionnent en même temps. ● Prend en charge le système PC Linux et le système ARM Linux. ● Compatible avec le protocole Vision et d'autres logiciels de vision de marque. |
| modèle | E. Je suis désolé. Le pixel actif | Capteur | Résistance à la compression | Résolution maximale | Taille du pixel | Taux d'images (FPS) | Taille cible | Exposition à l'air | Modèle de capteur | Couleur |
| Le MV-31GM-GE | 0,3 MP | Système de gestion des données | mondial | 752×480 | 6,0 μm | 108.25 | 1/3" | 0,017 secondes | MT2dépôt de pension | MONO |
| Le numéro de série de la licence est le numéro de série de la licence. | 0,3 MP | Système de gestion des données | mondial | 640×480 | 7,4 μm | 164.75 | 1/3" | 0,0001 ms | Sharp | Couleur/mono |
| Le MV-33GM-GE | 0,3 MP | Système de gestion des données | mondial | 640×480 | 8,0 μm | 160 | 1/2.7" | 0,006 ms | Les smartSens | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 0,3 MP | Système de gestion des données | mondial | 640×480 | 4,8 μm | 392.25 | Un quart de pouce. | 0,004 ms | PYTHON | Couleur/mono |
| Le MV-40GM-GE | 0,4 MP | Système de gestion des données | mondial | 720 × 540 | 6,9 μm | 299 | 1/2.9" | 0,005 ms | IMX287 | MONO |
| Le MV-130RM-GE | 1.3MP | Système de gestion des données | D'autres | 1280×1024 | 5,2 μm | 30 | Une demi-pointe. | 0,03 seconde | MT2dépôt de pension | MONO |
| Le MV-122GC-GE | 1.3MP | Système de gestion des données | mondial | 1280×960 | 3,75 μm | 72.25 | 1/3" | 0,014 secondes | Les produits de base | Couleur |
| Le MV-123GM-GE | 1.2MP | Système de gestion des données | mondial | 1280×960 | 3,75 μm | 60.75 | 1/3" | 0,016 secondes | Les produits de base | MONO |
| Le MV-130RC-GE | 1.2MP | Système de gestion des données | D'autres | 1280×960 | 3,75 μm | 60.5 | 1/3" | 0,016 secondes | Les produits de base | Couleur |
| Le MV-133GM-GE | 1.3MP | Système de gestion des données | mondial | 1280×1024 | 4 μm | 91 | 1/2.7" | 0,0061 ms | Les produits de base | MONO |
| Le MV-134GC-GE / M est à l' écoute. | 1.3MP | Système de gestion des données | mondial | 1280×1024 | 4,8 μm | 91.5 | Une demi-pointe. | 0,008 ms | PYTHON | Couleur/mono |
| Le véhicule est équipé d'un système de contrôle de la circulation. | 2MP | Système de gestion des données | D'autres | 1920×1080 | 2,9 μm | 30 | 1/2.8" | 0,02 ms | Je suis Sony. | Couleur |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 2MP | Système de gestion des données | mondial | Le nombre de points de contact | 4,5 μm | 60 | Je suis désolé. | 0,01 à 15 secondes | Les produits de la catégorie 1 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 2MP | Système de gestion des données | mondial | 1920 × 1200 | 4,8 μm | 51 | 2/3" | 0,005 ms | PYTHON2000 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 2MP | Système de gestion des données | mondial | Le nombre de points de contact | 4,5 μm | 61.5 | Je suis désolé. | 0,0126 ms | Le numéro IMX430 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 2.3MP | Système de gestion des données | mondial | 1920 × 1200 | 5,86 μm | 40.25 | 1/1,2 " ou | 0,02 ms | Le numéro IMX249 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 2.3MP | Système de gestion des données | mondial | 1920 × 1200 | 3 μm | 52 | Je suis désolé. | 0,014 secondes | Les produits de base | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 3MP | Système de gestion des données | mondial | 2048×1536 | 3,45 μm | 38 | Je suis désolé. | 0,016 secondes | Le numéro IMX265 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 5 MP | Système de gestion des données | mondial | 2448×2048 | 3,45 μm | 24 | 2/3" | 0,019 secondes | Le numéro IMX264 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 5 MP | Système de gestion des données | D'autres | 2592×1944 | 2,2 μm | 24 | 1/2,5 pouces | 0,02 ms | Les produits de base | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 5 MP | Système de gestion des données | mondial | 2592×2048 | 4,8 μm | 23 | 1" | 0,005 ms | Je suis en train de faire un test. | Couleur/mono |
| Le MV-535GC-GEM | 5 MP | Système de gestion des données | mondial | 2592×2048 | 3,2 μm | 22 | 2/3" | 0,04 seconde | XGS5000 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" | 6,3 MP | Système de gestion des données | D'autres | 3088×2064 | 2,4 μm | 18.75 | Je suis désolé. | 0,025 secondes | Le numéro IMX178 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 8MP | Système de gestion des données | D'autres | 3840×2160 | 2,0 μm | 14.25 | Je suis désolé. | 0,06 seconde | OEM | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de type "A" ou "B" | 10 MP | Système de gestion des données | D'autres | 3664×2748 | 1,67 μm | 8 | 1/2,3 " | 0,043,0 secondes | MT2dépôt de pension | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 12 MP | Système de gestion des données | D'autres | Le nombre de points de contrôle | 1,85 μm | 9.75 | Je suis désolé. | 0,01 secondes | Le numéro IMX226 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 12 MP | Système de gestion des données | D'autres | Le nombre de points de contrôle | 1,6 μm | 9.75 | Une demi-pointe. | 0,034 secondes | Les produits de base | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 16 MP | Système de gestion des données | D'autres | 4608×3546 | 1,34 μm | 7 | 1/2,3 " | 0,039 secondes | Le numéro IMX206 | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 20 MP | Système de gestion des données | D'autres | Le nombre de points de contact est le suivant: | 2,4 μm | 6 | 1" | 0,04 seconde | Le numéro IMX183 | Couleur/mono |
| Les données de référence doivent être fournies conformément à la procédure suivante: | 0,3 MP | CCD | mondial | 640×480 | 7,4 μm | 164.75 | 1/3" | 0,0001 ms | Sharp | Couleur/mono |
| Les données de référence doivent être fournies à l'autorité compétente. | 1.3MP | CCD | mondial | 1280×960 | 3,75 μm | 43.5 | 1/3" | 0,0001 ms | Sharp | Couleur/mono |
| Les données sont fournies par le système de surveillance. | 2MP | CCD | mondial | Le nombre de points de contact | 4,4 μm | 27.5 | Je suis désolé. | 0,0001 ms | Sharp | Couleur/mono |
| Les données de référence doivent être fournies à l'autorité compétente. | 5 MP | CCD | mondial | 2448×2048 | 3,45 μm | 9.25 | 2/3" | 0,0001 ms | Sharp | Couleur/mono |
| Les données de référence doivent être fournies à l'autorité compétente. | 4MP | Système de gestion des données | D'autres | 2048×2048 | 5,94 μm | 27 | 1.1" ou plus | 0,017 secondes | OEM | Couleur/mono |
| Les données de référence sont les suivantes: | 5 MP | Système de gestion des données | D'autres | 2640×1968 | 6,6 μm | 21.5 | 4/3" | 0,01 seconde | OEM | MONO |
| Les données de référence doivent être fournies conformément à la norme ISO 11992-2. | 12 MP | Système de gestion des données | mondial | 4112 × 3088 | 3,5 μm | 9.25 | 1.1" ou plus | 0,0327 secondes | MQM | Couleur/mono |
| Les données de référence doivent être fournies par le fabricant. | 16 MP | Système de gestion des données | mondial | 4112 × 4112 | 3,5 μm | 7.25 | 4/3" | 0,0327 secondes | OEM | Couleur/mono |
| Les données de référence doivent être fournies conformément à la norme ISO 11992-2. | 5 MP | Système de gestion des données | mondial | Le nombre de points de contrôle | 3,4 μm | 24 | 2/3" | 0,0201 secondes | GMAX3405 | Couleur/mono |
| Les données de référence doivent être fournies à l'autorité compétente. | 4MP | Système de gestion des données | mondial | 2048×2048 | 5,5 μm | 29 | 1" | 0,016 secondes | OEM | Couleur/mono |
| Le numéro de série de la licence est le numéro de série de la licence. | 8,9 MP | Système de gestion des données | mondial | 4096×2160 | 3,45 μm | 13.5 | 1" | 0,034 secondes | Pour les produits de base | Couleur/mono |
| Le véhicule doit être équipé d'un système de sécurité de sécurité. | 12 MP | Système de gestion des données | mondial | 4090 × 3000 | 3,45 μm | 9.5 | 1.1" ou plus | 0,034 secondes | Pour les produits de base | Couleur/mono |
| Les données de référence doivent être fournies à l'autorité compétente. | 12 MP | Système de gestion des données | mondial | 4096×3072 | 3,2 μm | 9.5 | 1" | 0,031 secondes | XGS12000 | Couleur/mono |
| S'il vous plaît contactez-nous pour en savoir plus sur les modèles! | ||||||||||
| modèle | MV-134GC-GE/M |
| Capteur | 1/2" CMOS, PYTHON |
| Résistance à la compression | mondial |
| Couleur | Couleur/mono |
| Taille du pixel | 4,8X4,8μm |
| Pixels efficaces | 1.3MP |
| Résolution @ cadrage | 1280x1024 @91IPS |
| Profondeur de bit de pixels | 10bit |
| Sensitivité | 7,3V/lux.s/540nm |
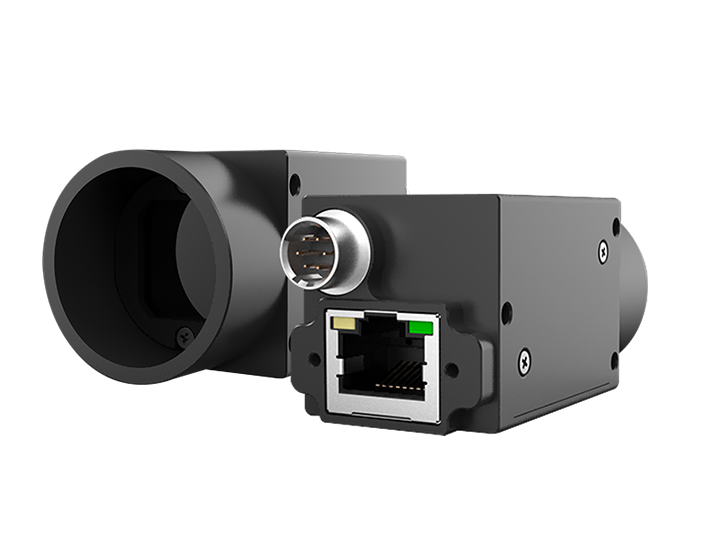
| Port I/O | Entrée d'isolement optique à sens unique, sortie d'isolement optique à sens unique; sortie optionnelle 3 entrées 4 |
| Synchronisation | déclencheur externe / logiciel / fonctionnement libre |
| Gain maximal | 16.5 |
| Temps d'exposition (ms) | 0,008~1048 |
| Filtrer | Filtre à coupe infrarouge standard de 650 nm/film amélioré AR standard à double face |
| Puffer de trame | 32M bytes |
| Données personnalisées de la caméra | 2K octets |
| Format de sortie vidéo | Bayer8/Bayer12, Mono8/Mono12: les produits à base de plantes |
| Protocole standard visuel | Je vous laisse voir. |
| Monture de lentille | C-mount est par défaut, interface C ou CS optionnelle (distances d'extension de lentille M12 disponibles) |
| Interface de données | Interface RJ45 Gigabit Ethernet, rétrocompatible avec la norme réseau 100M |
| Besoins en énergie | 9- 24V (POE est optionnel) |
| Consommation de puissance | < 2,5 W |
| Dimensions | 29 (mm) x 29 (mm) x 40 (mm) (hors base de l'objectif et ports du boîtier arrière) |
| Poids | < 7 5 g |
| Température de fonctionnement | 0 ~ 5 0 ° C |
| Humidité de fonctionnement | 20 à 80% (non condensé) |
| Température de stockage | - 30 à 60 ° C |
| Humidité de stockage | 20 à 95% (non condensé) |
| Système de support | Systèmes 32 et 64 bits WINXP, WIN7/8/10, pilotes Linux et ARM pour les plateformes Linux et Android (personnalisable) |
| Les conducteurs | Components DirectShow Components spéciaux Halcon Components dédiés de Labview Components OCX Components TWAIN |
| Langue de pré-grammaison | C / C++ / C# / VB6 / VB.NET / Python |
| Contrôle programmable | Taille de l'image (ROI), appareil photo, temps d'exposition, GAMMA, contraste, luminosité, LUT personnalisé, retour de miroir, gain de couleur RVB, saturation, netteté, couleur à mono, correction de la température de couleur, anti-couleur, mode |
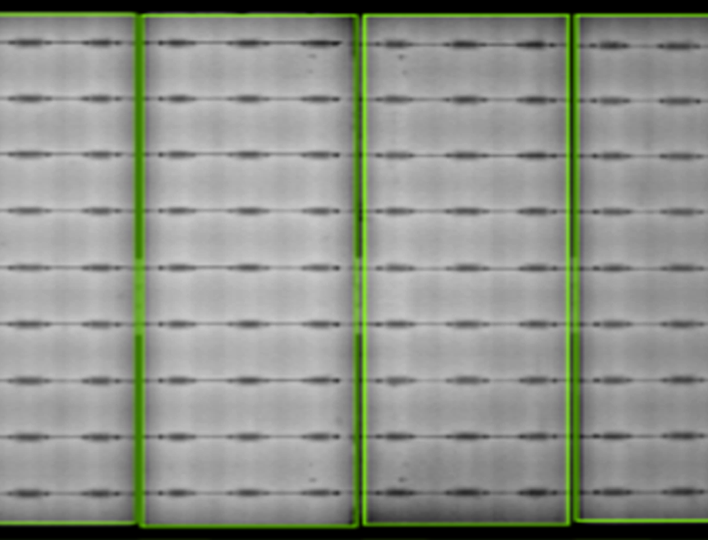
Détection de défaut EL de cellule solaire
Les défauts courants de la batterie sont le soudage virtuel, la fissuration, la fragmentation et ainsi de suite. Affecter directement la puissance du composant, réduire la durée de vie du composant ou causer des déchirures. La détection manuelle a une faible efficacité et une grande détection manquée Le taux de détection des objets est plus élevé, et l'algorithme de détection des objets d'apprentissage profond est plus efficace.
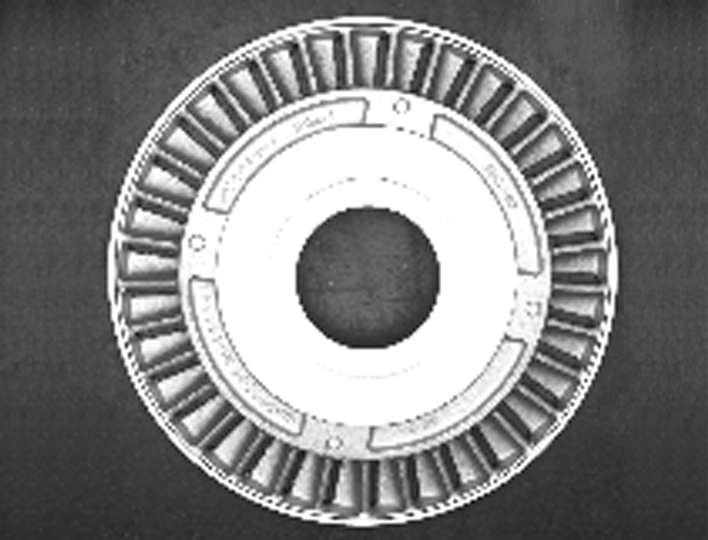
Anti-mélangeur OCR pour stator de moteur automobile
Il existe de nombreux types de produits dans la ligne de production de stators de moteur automobile, et il est nécessaire d'identifier les caractères et les caractéristiques des produits pour déterminer le modèle de produit. Lorsqu'il est constaté que différents modèles sont mélangés, un signal d'alarme est émis.
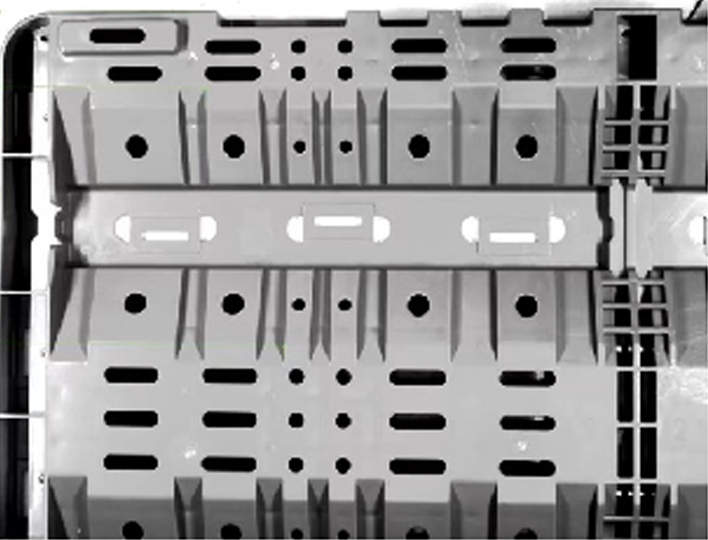
Mesure des dimensions de la palette
La taille du produit de plateau est de 1m*1m, il est nécessaire de mesurer la taille externe du produit et la taille de la rainure interne, et la précision doit être de ±1mm.Utilisez une disposition de 4 caméras pour couvrir l'ensemble du produit.

Screw de positionnement à trous multiples et dispositif de positionnement
En améliorant l'imagerie pour trouver le centre du contour et en ajoutant une compensation, la caméra peut réaliser la vis de plusieurs trous à la fois. Ensuite, utilisez la méthode de calibrage et de lecture de la carte de calibrage de la carte à coque, la position fixe du couvercle du produit est aspirée et fixée sur le produit.
Le Q1. Puis-je avoir une commande d'échantillon pour la caméra de balayage de la zone ?
R: Oui, les commandes d'échantillons et toutes les commandes sont acceptables.
Le Q2. Quel est le délai?
R: 3-5 jours pour les commandes d'échantillons/petites (< 50 pièces), 1-2 semaines pour les achats en vrac (> 50 pièces).
Le Q3. Quelle est votre MOQ pour la caméra de balayage de la zone ?
R: La quantité maximale est de 1 pièce.
Le Q4. Quel est votre délai de livraison et combien de temps faut-il pour arriver?
R: Nous expédions habituellement par DHL, UPS, FedEx ou TNT. Il faut généralement 5 à 7 jours par avion. L'expédition maritime est également acceptable.
Le Q5. Comment passer une commande pour une caméra de balayage de zone ?
R: Un. Confirmer la résolution de la caméra, la taille du capteur, l'interface;
2. Le dépôt de la demande. Confirmer la résolution de l'objectif de la caméra, la taille du capteur, la distance focale, le logo, l'interface;
3. Le retour de la guerre Confirmez la commande et le devis;
4. Le dépôt de la demande. - Pour payer les commandes et organiser la production.
- Je vous en prie. Vérifiez le produit et organisez la livraison.
Le Q6. Vous soutiendrez les labels privés?
R: Oui, nous le faisons.
Q7: Quelle est la durée de garantie de votre produit?
R: Nous offrons 2 à 5 ans de garantie pour nos produits.
Q8: Comment traitez-vous les produits défectueux?
R: 1, Nos produits sont produits dans un système de contrôle de qualité strict avec un taux défectueux de 0,2%.
2, si des dommages non artificiels, des dysfonctionnements ou des erreurs surviennent pendant la période de garantie, les clients peuvent faire des réparations, des remplacements ou un remboursement partiel/entier.
MV-134GCM-GE(Specifications & Drawings).pdf
TÉLÉCHARGER