Pada bagian pemeriksaan kualitas proyek ini, tegangan diukur dengan menggunakan dua probe untuk menusuk masing-masing ujung dari sambungan solder, sehingga dapat menilai apakah sambungan solder pada papan PCB dalam kontak yang baik dan mengeliminasi produk-produk yang bermasalah.
Bagikan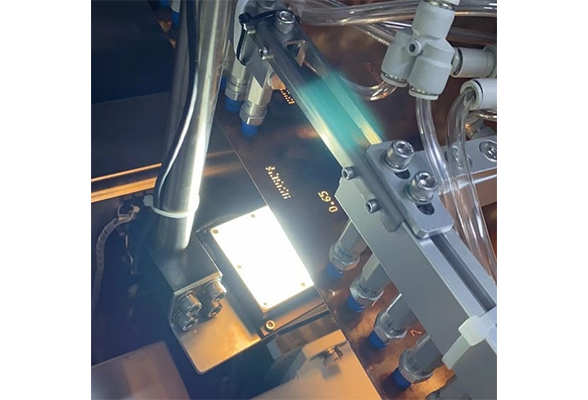
1) dan Latar belakang proyek:
Deskripsi persyaratan:
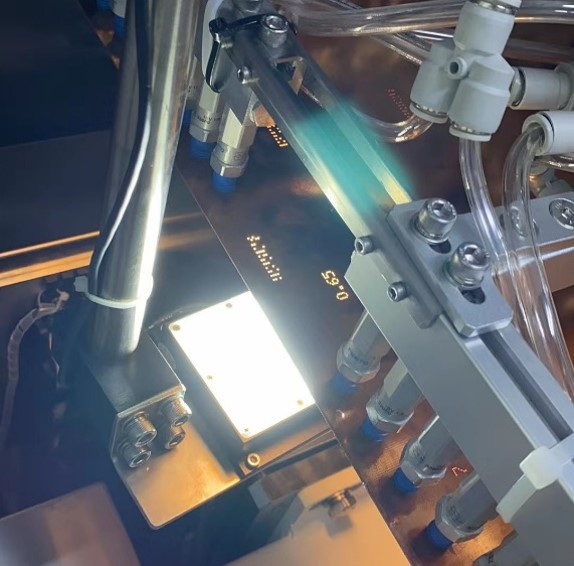
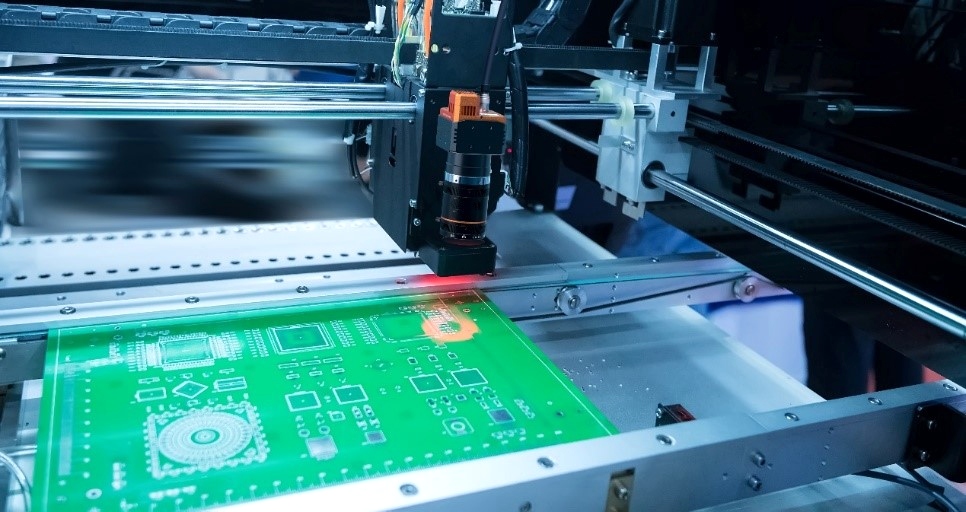
Pertama, papan PCB difoto oleh kamera atas, dan koordinat dari titik solder yang perlu diukur diberikan untuk posisi kasar. Kemudian kedua manipulator masing-masing membawa sebuah probe ke koordinat yang sesuai untuk memotret titik solder, melakukan posisi tepat, lalu mengetes titik solder bersamaan untuk mengukur tegangan dan menentukan apakah titik solder tersebut baik.
Titik kesulitan dan masalah:
1. Menggunakan skema tradisional, biaya seluruh kamera, lensa, sumber cahaya, pengontrol sumber cahaya, dan lainnya lebih tinggi.
2. Skema tradisional memiliki proses yang rumit, persyaratan tinggi untuk personel debugging di lapangan, dan biaya tenaga kerja tinggi.
3. Solusi tradisional memiliki periode debugging yang panjang dan tidak dapat diluncurkan dengan cepat.
2) Pengelolaan Arsitektur solusi:
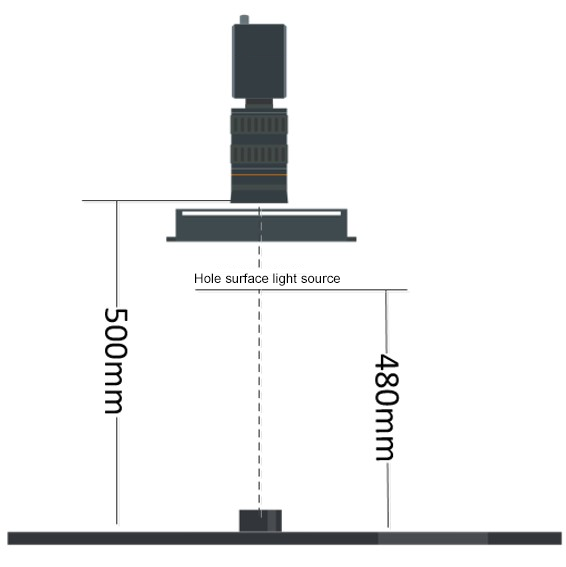
Diagram ereksi:
Proses debugging:
1. Manipulator membawa lembar kalibrasi dan mempertahankan ketinggian yang sama dengan papan PCB. Mengambil gambar dengan kamera, membangun proses dengan VM, menerima koordinat fisik manipulator melalui protokol komunikasi TCP, dan melakukan kalibrasi otomatis sembilan titik.
2. Lengan robot membawa kamera pintar untuk memotret papan kalibrasi, melakukan penandatanganan titik, dan menghasilkan file kalibrasi melalui gambar dan koordinat fisik dari sembilan titik.
3. Posisi papan PCB dikirim ke lengan robot, dan lengan robot membawa kamera pintar ke posisi yang sesuai untuk memotret sambungan solder.
kamera pintar menggunakan pencarian titik untuk membingkai setiap posisi sambungan solder secara berurutan, kalibrasi koordinat dan mengonversinya untuk mencapai pengurutan.
setelah membuat perbedaan antara posisi foto kalibrasi kamera pintar dan posisi foto produksi, tambahkan nilai konversi kalibrasi sambungan solder untuk mendapatkan posisi sebenarnya dari setiap sambungan solder.
3). Keuntungan dari program:
gunakan kamera atas untuk mengambil gambar koordinat manipulator di kedua sisi secara langsung, dan kedua manipulator mencapai titik target setelah pengambilan gambar melalui kalibrasi dan transformasi, tanpa perlu pergi ke sana secara bertahap, yang sangat menghemat waktu pergerakan manipulator. Seluruh proses telah berkurang dari 15 detik menjadi sekitar 5 detik.
dengan mengurangi kotak persegi panjang pencarian sambungan solder dan menempatkan setiap sambungan solder secara individu, posisi sambungan solder dapat ditentukan dengan baik. Pelanggan membutuhkan akurasi 0,1mm, dan akurasi saat ini mencapai 0,05mm untuk memenuhi kebutuhan pelanggan.
proyek ini adalah proyek yang menggunakan kamera pintar klasik dan kamera industri bersama-sama. Dalam proyek sebenarnya, jenis kamera yang sesuai dapat dipilih berdasarkan kebutuhan aktual, bahkan kedua kamera dapat digunakan bersama untuk menyesuaikan dengan lingkungan pelanggan dan mencapai efek yang diinginkan.
rencana awal pelanggan adalah mengirim koordinat ke kamera atas setelah mengambil gambar pertama, lalu mengirim koordinat untuk gambar kedua setelah mengambil gambar kedua. Rencana saat ini hanya memerlukan satu kali pengambilan gambar dan memanggil file kalibrasi yang berbeda untuk mengontrol lengan robot 1 dan 2 secara simultan, sehingga efisiensi keseluruhan meningkat sebesar 20%.