貨物車で荷物を荷下ろし場まで運び,フォークリフトで荷下ろした後は,直接3D操作装置に運び,整理・卸しします. 完成後 AGV は対応する作業場への輸送に協力するために使用されます
共有する
プロジェクト背景:
顧客からの需要:
異なるサイズの容器を特定し分解する
顧客が痛みを感じるポイント
1. 箱の異なるサイズ 混合識別,対応する握り方向の箱出力の位置とサイズに応じて.
2. 露出量は朝から夜 (晴れや曇り) にリアルタイムで変化し,製品の認識率とシステムの安定性を改善する必要があります.
解決方法のアーキテクチャ:
全体のプロセス:

重要なプロセスモジュール:
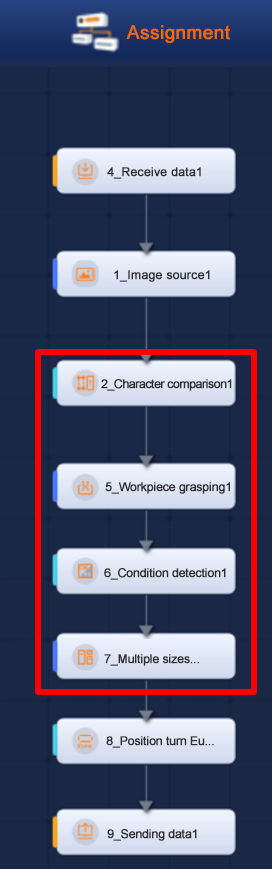
文字比較: 対応するマッチングコマンドを設定し,それを用いて後続のモジュール検出を論理的に起動します.
作業部件の取り: 作業部件を取りたい rgb イメージの領域を,実際のフレームの外側の枠を超えたボックス選択の範囲で描く.
状態検出: 製品が認識されているかどうかを判断し,対応するOK/ng論理信号をホストコンピュータに送る.
多サイズボックス:様々なサイズのパレティ化型の箱の関連パラメータを設定し,パレティ化を解除する作業を実行し,アルゴリズムモデルを分割するために例を使用し,モデル訓練のためにさまざまな製品配置位置の写真を収集します.
プログラムメリット
1. 照明の大きな変化を前提として,画像は明確で認識は安定し,受信信号から出力データまでの時間は3.5秒です.
異なるサイズで,100%の認識率を達成するために,素材の箱の色.
生産の24時間連続を実現するために,生産効率が100%向上しました.
4 3D-rgbd メカニカル・マニュアル・ステーションは5人の労働力を置き換える










