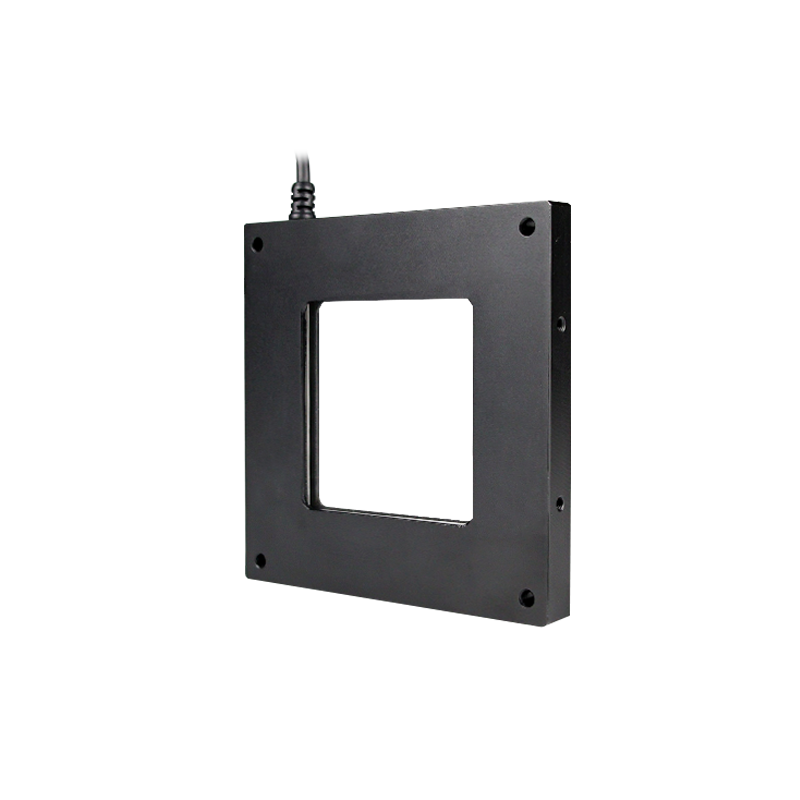
プロジェクト要件
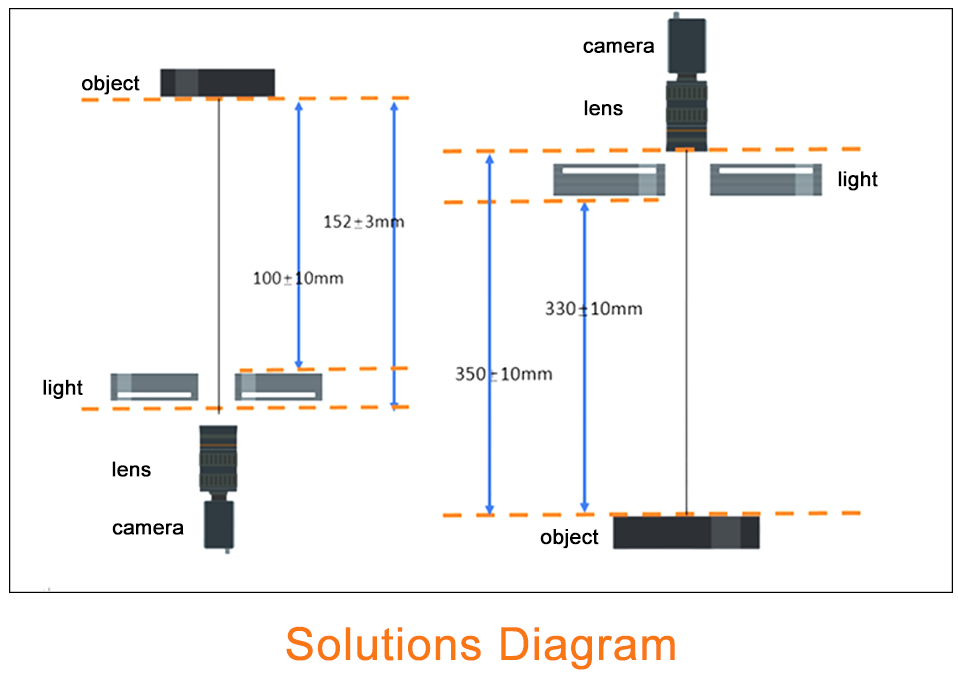
表面の薄膜を撮影し 下のカメラは磁石シートを撮影し 調整と結合を行います
2コア技術
機械の腕は,アライナインと結合を行う.
3 プロジェクトの困難
フィルム撮影が完了した後,結合する前に90°回転する必要があります. 慣習的な結合方法は不安定で,実際の試験では大きな誤差があります.
4 プロジェクトの解決策
円の中心とカメラ上の四角形の中心点を求めます 遠くの中央はフィットポイントで 円の中心と四角形の中央の間の角はフィット角度です カメラフィルムの四角形の中心点と円の中心を見つけ,円の中心はフィットポイントで,円の中心と四角形の中心をフィット角度として接続する線です.
まず,円の中心を90度回転した後,仮想点位置を計算し,この点位置を単点の並列に使う.
5 プロジェクトの成果と価値
顧客にハードウェアとソフトウェアのサポート機器を提供することで,全体的なソリューションは迅速に構築され,非常に実用的です. 顧客に不安定なフィットメント状況を解決し,製品の品質を確保する手助けをする.
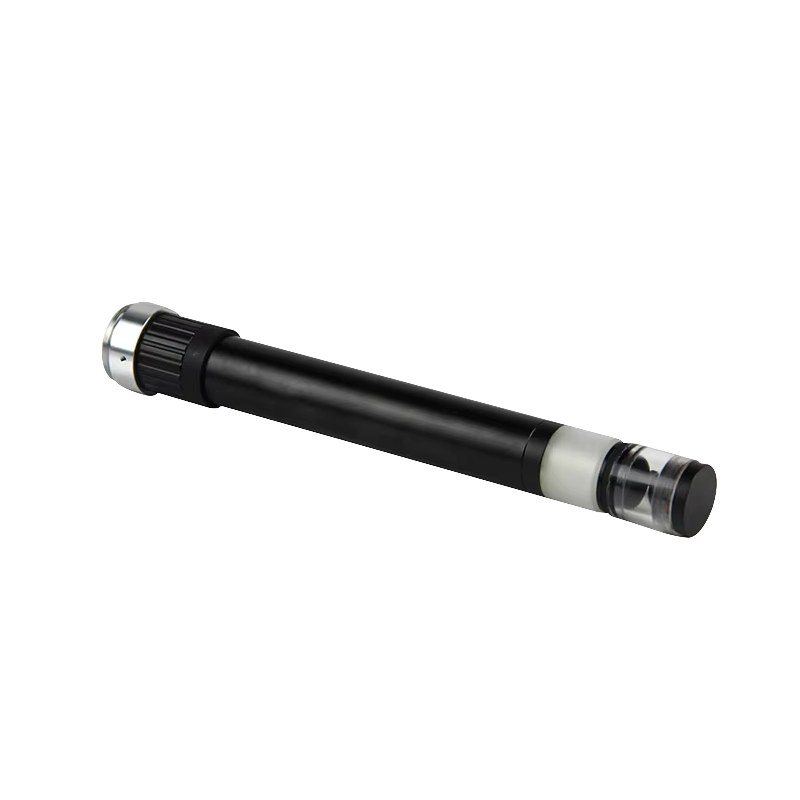
プロジェクト要件
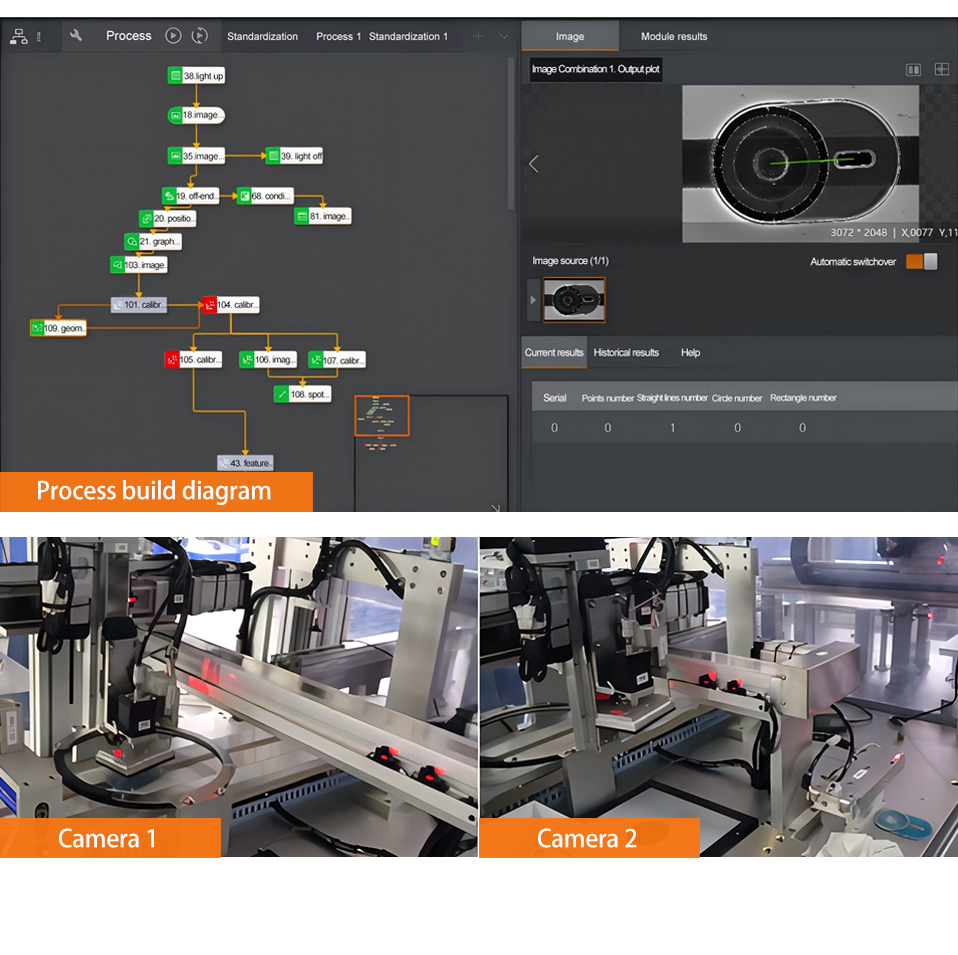
• 10個のペンコアを同時に10本のペンコアのペン先に黒いインクと透明なインクサイズがあるかどうかを確認します.
視力デバッグと機器の受容を実行する.
• インターフェースの生産
2コア技術
複数の製品状態検出と論理モジュールの組み合わせ使用

3 プロジェクトの困難
• ペン補充剤の種類は不一致で,画像の違いがあります.
• 距離検知が不正確
4 プロジェクトの解決策
• 画像を二元化した後,差を小さくします.
• 開始 と 終了 の 点 を 別々 識別 し,それから 点 で 測定 し て ください.
5 プロジェクトの成果と価値
ソフトウェアとハードウェアのサポート機器を顧客に提供することで,ソリューションの構築速度が迅速になります.
顧客は,偽陽性と偽陰性の可能性が低いので,品質検査要件を満たすように,インターフェースを自分で編集し設計することができます.


|
分析する 要求事項 |
|
|
プロジェクト要件を特定する |
欠陥検出,寸法測定,文字認識など |
|
環境条件 |
照明条件,背景の複雑性,標的物体の種類と特性など |
|
体系的な設計 |
|
|
ハードウェアオプション |
カメラ,レンズ,光,プロセッサなど |
|
ソフトウェア設計 |
適切な画像処理アルゴリズムやソフトウェアプラットフォームを選択または開発 |
|
体系的な統合 |
|
|
ハードウェア統合 |
カメラ,レンズ,ライト を 置く |
|
ソフトウェア統合 |
画像処理アルゴリズムは制御システムに組み込まれています |
|
テストと最適化 |
|
|
システム試験を実施する |
システムの性能は実際の作業環境でテストされます |
|
パラメータ調整 |
試験結果によると,カメラのパラメータ,光源の明るさ,アルゴリズムパラメータ,など |
|
導入と維持 |
|
|
システム展開 |
テストされ最適化されたシステムは実際のアプリケーションシナリオに展開されます |
|
メンテナンスとアップグレード |
システム の 定期 的 保守,発生 する 問題を 解決 し,必要 に かける ソフトウェア や ハードウェア の 更新 |

 アプリケーション領域: 産業自動化,ロボットナビゲーションと制御,交通管理,医療画像,農業と食品安全,セキュリティ監視,小売と物流,教育と研究,スマートホーム
アプリケーション領域: 産業自動化,ロボットナビゲーションと制御,交通管理,医療画像,農業と食品安全,セキュリティ監視,小売と物流,教育と研究,スマートホーム
 簡単な紹介:
簡単な紹介:
機械ビジョンのカスタマイズソリューションは,特定のアプリケーション要件に応じて設計・実装する必要があります. 関連分野における専門家との協力により,プログラムの実行可能性と効果がよりよく確保できます.