プロジェクト背景:
要求の説明:
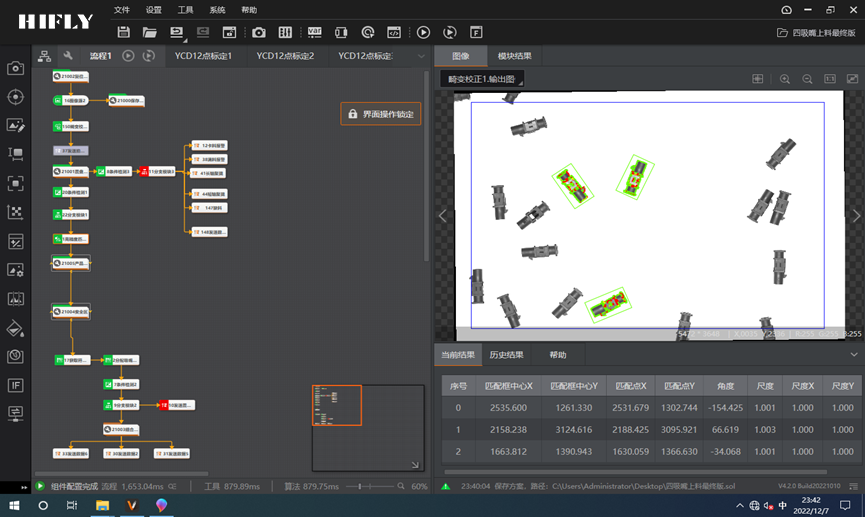
このプロジェクトは,様々な材料のロードとグリップを実現するためにVMアルゴリズム開発プラットフォームを使用しています. 材料は振動ディスクを通じて分散され,要件を満たす材料はまず視力によってスクリーニングされ,その後視覚的に位置付けられます. プロジェクトの難点は,互換性のある特殊形状の部品の360度のフルアングルグリップの精度を最適
技術要求:
(1) 振動ディスク製品吸収を達成するために,位置位置精度 ±0.25mm
(2) 材料の方向を判断し,左と右の方向を区別する
(3) 材料の上下方向をスクリーンする必要があります.
(4) 安全ゾーン機能は,振動ディスクに近い材料をスクリーニングする必要があります
(5) 混合物をスクリーニングする必要があり,同じ材料を掴むことができません
解決方法の建築
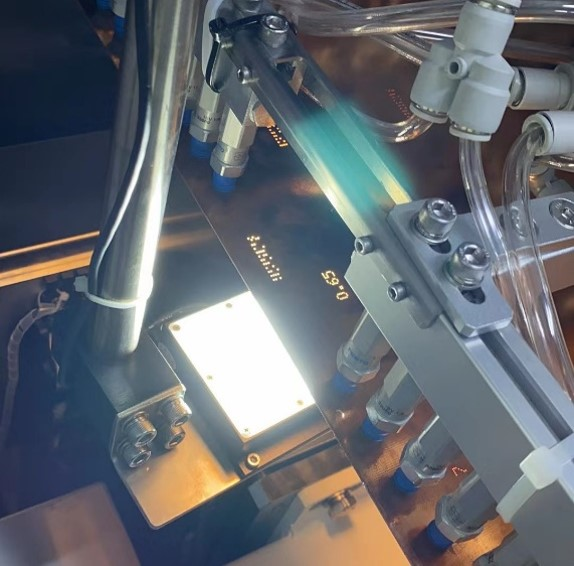
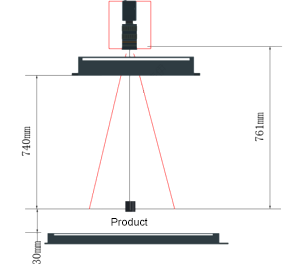
このスケムは,前照明源と後照明を使用し,材料の輪郭を印刷し,高作業距離と大きなフィールド深さのニーズを満たすためにファレンスをマッチします.
3) プログラムの利点
形状のある部品の自動給餌機能が実現され,欠落した握り率は0.1%未満です.
顧客高速操作機で材料を採取し,高速給餌要求を7200pcs/hを達成することができます.
開発と販売後の保守コストを削減するために,プロジェクト構築を完了するためにソフトウェアエンジニアを必要としません.