Баш сафына > Чечимдер > Жарым өткөргүчтөр/интегралдык схемалар
Бул проекттин сапардык текшерү бөлүмүнө каршы, эки зондун аркылуу ПОС-коюлордуң эки жаагына баштап, вольтты измерилүүге мүмкүнчүлүк берет, ушул эле ПОС-коюлордуң доскасындагы жакшы контакт болуп эсептелүүсүн жана проблемалык максаттарды жок кылууда катта маани келет.
Бөлүшүү
1). Проекттын ар кычагы:
Талаптардын түшүнүктөөсү:
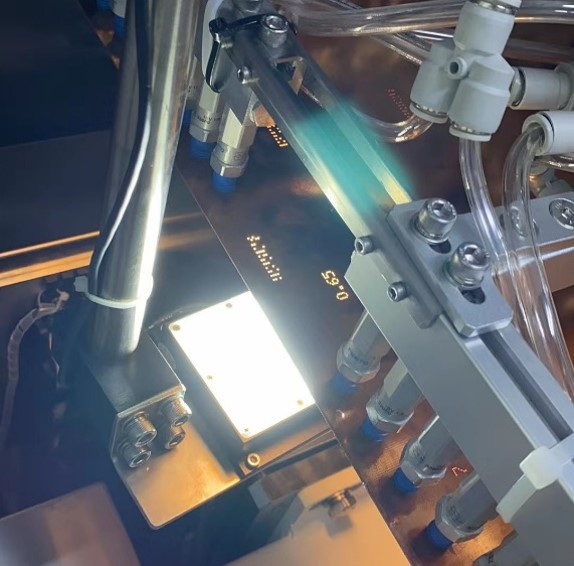
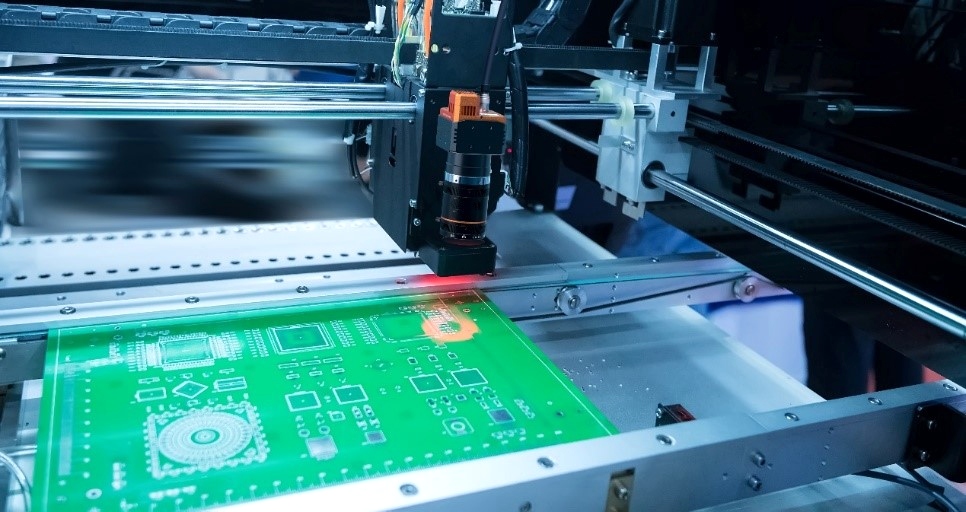
Биринчи жолу, PCB доскасын ташкилдагы камера аркылы сүрөт алышат, жана өлчөм алууга керек болгон чарбактардын координаталары баштапкы позициялашу үчүн берилет. Андан кийин эки манипулятор аркылы чарбакко чейин көзгөч тушүрүлөт, чарбакты сүрөт алышат, анда даярдап позициялаш кылынып, соң chicago чарбакты бирге тырышып, вольтду өлөшөт жана чарбак жакшы экенин текшерип берет.
Өмкөрдүк нокталар жана маселелер:
1.Традиционал схема аркылы, камера, линза, излучатель, излучательдик контролдер жана башка да эсептери чоң.
2.Традиционал схемада процесстер чоң, жерде откуруучуларга чоң талаптар бар жана чоң ишчүлүк эсептери бар.
3.Традиционал чечимде откурма периоду узун жана тез кичине чыгарылбайт.
2). Тезкенеш көздөгү:
Үрөө схемасы:
Откурма процеси:
1. Манипулятор калибровочное лист алып, PCB панелесинин жогоркуу жерин сактап, камера аркылы суранычтарды түшүрүп, VM белгиси менен процессти қуруп, TCP kommunikatsiya протоколун аркылы манипулятордун физикалык координаталарын алабыз жана учу нүктөгө автоматтык калибровка башып чыгар.
2. Роботтук коло акылкуу камера алып, калибровочную доска суроо жасайбыз, нүктөлөрдү стампалаңыз жана учу нүктөнүн суроолору менен физикалык координаталарын аркылы калибровка файлдарын генерациялоо.
3. PCB панелесинин жериги роботтук колго жетип берилген, жана роботтук кол акылкуу камераны сол жерге откоzoн жана шовду суроо үчүн фотография түшүрүп жатат.
4. Акылкуу камера экинчи шовдун үстүндөгү координаталарды таандык жол менен калибровка жана оларды сорттоо үчүн конверсиялоо.
5. Акылкуу камера калибровка суроолорунун жерлегиштерин жана иштеги суроолорун арасындагы айырмашылыкты табыштан кийин, шовдун калибровка коэффициентин өсүрүп, өзгөчө шовдун әкіркүчү жерин табабыз.
3). Программа артыкчалыгы:
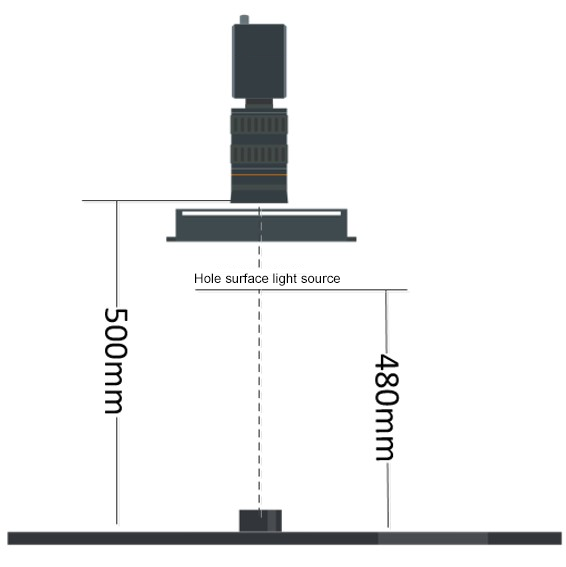
1. Жогорку камерадан фойда兰ып, эки жактынгы манипулятордун координаттарын сүрөт алуу үчүн колдонулат, ал эки манипулятор камеранын калибровка жана трансформациясынан кейин маалымат алып, башкы нүктеге тийиш жолу менен келишини керек, алыс жолго жетүүгө тууралуу эмес, алdana манипулятордин жылдыzuу убакытынын көп чейин кайрылышынан чейин көздөгөн.
2. Издөө жумуштуң колдонулугу аркылы жана өзгөчө solder joints-ди таандоодо, ошондуктан solder joint-ди жакшы ретте таандообоз. Клиенттик 0.1 мм даярдыйтын кайрады, жана азынча 0.05 мм даярдыйга жетет, клиенттик талаптарына сай болуп саналат.
3. Бул проект classic smart камера жана industrial камера бирге колдонулган проект. Оңой project-ди камера түрүнө карабаганда, мисалы, camera-нын түрүнө караганда, клиенттик жарандарына сай болгондо, бирок экисини бирге колдонуп, клиенттик жарандарына сай болгондо, керек эфектти көрсөтөт.
4. Мисалынан кийин клиенттин баштагы жосою планы экинчи сурот түзүп, ошондой эле жогорку камера координатасына карши келген позицияга жеткүч unique ID-ка чейин координаталарды жөнөтүү болсо, анда экинчи сурот үчүн координаталарды жөнөтүү. Азыркы планда тек бир рет сурот түзүүгө жана башка калибрировка файлдарын чакыруу аркылы негизги робот дуйнөсүнүн биринчи жана экинчи колдонулушу боюнча бир убакытта жөнөтүлүшү мүмкүн, жана бардык эффициентти 20%-ка артты.