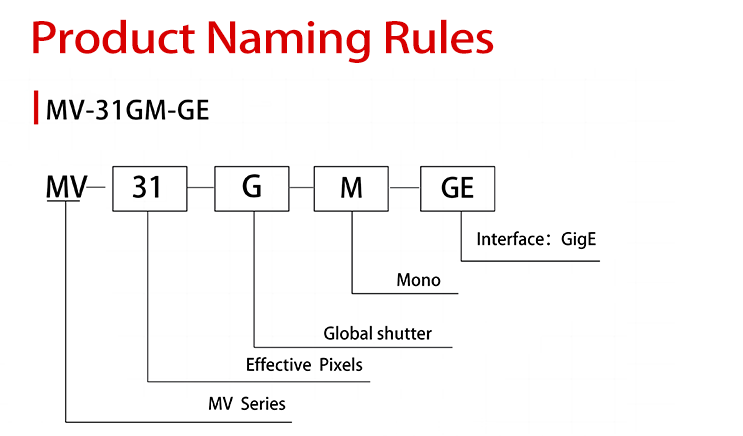
Strona główna / Produkty / Kamery przemysłowe / Kamera skanująca obszar / Kamery skanującej obszar mv-2100rc-ge/m
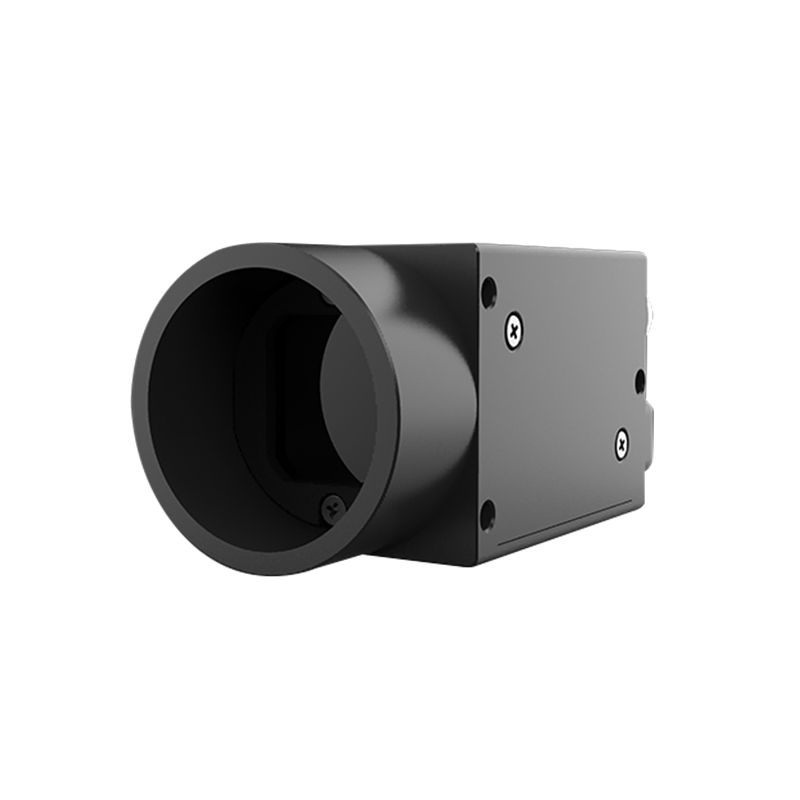
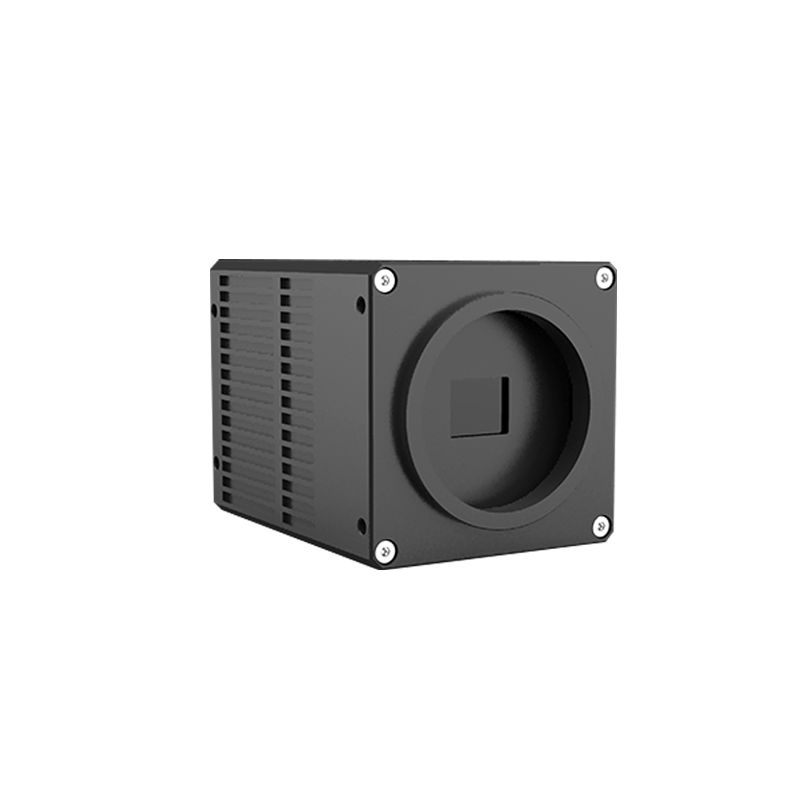
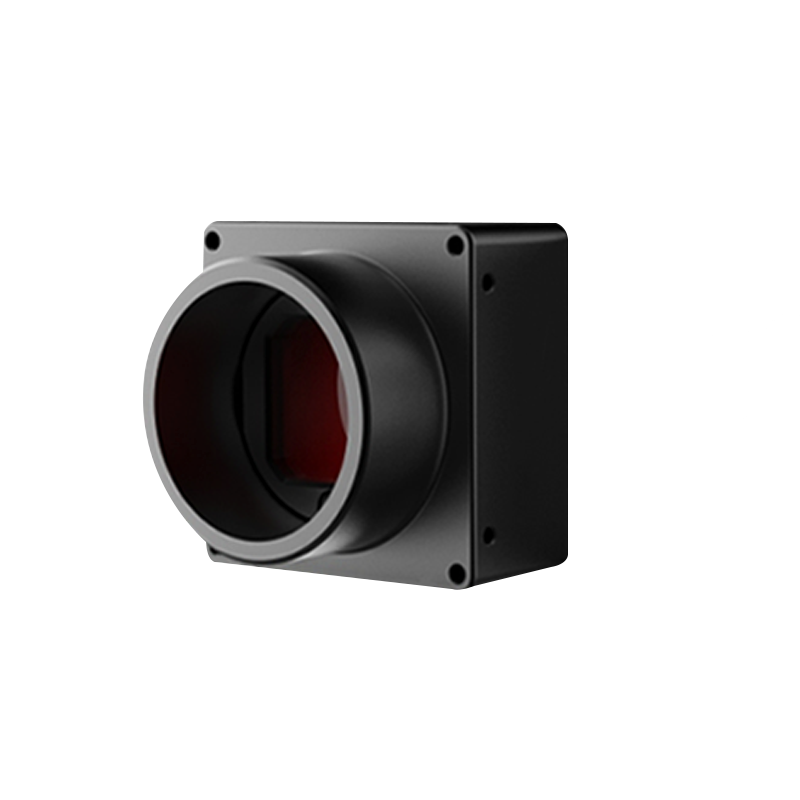
Mv-2100rc-ge/m gige kamery przemysłowe 1" 20mp 5,9fps
|
Ta seria kamer GigE ze skanowaniem obszarowym obejmuje kamery kolorowe i monochromatyczne transmisja na duże odległości do 100 metrów. ● SDK typu plug and play. ● Obsługa 12-bitowego wyjściowego sygnału danych. ● Wiele kamer pracuje jednocześnie. ● Wspiera system PC Linux i system ARM Linux. ● Kompatybilny z protokołem Vision i innym oprogramowaniem wizualnym marki. |
| Model | E � ective Piksele | Transduktor | Ostrze | Maksymalna rozdzielczość | Rozmiar piksela | Szybkość klatek (FPS) | Rozmiar docelowy | Mini ekspozycja | Model czujnika | Kolor |
| MV-31GM-GE | 0,3 MP | CMOS | Globalne | 752×480 | 6,0 μm | 108.25 | 1/3" | 0,017 ms | MT9V024 | MONO |
| MV-D32M-GE/C | 0,3 MP | CMOS | Globalne | 640×480 | 7,4 μm | 164.75 | 1/3" | 0,0001 ms | Sharp | Kolor/Mono |
| MV-33GM-GE | 0,3 MP | CMOS | Globalne | 640×480 | 8,0 μm | 160 | 1/2.7" | 0,006 ms | SmartSens | Kolor/Mono |
| MV-34GC-GE/M | 0,3 MP | CMOS | Globalne | 640×480 | 4,8μm | 392.25 | 1/4" | 0,004 ms | PYTON | Kolor/Mono |
| MV-40GM-GE | 0,4 MP | CMOS | Globalne | 720×540 | 6,9 μm | 299 | 1/2.9" | 0,005 ms | IMX287 | MONO |
| MV-130RM-GE | 1.3MP | CMOS | Wyrzucanie | 1280×1024 | 5,2μm | 30 | 1/2" | 0,032 ms | MT9M001 | MONO |
| MV-122GC-GE | 1.3MP | CMOS | Globalne | 1280×960 | 3,75 μm | 72.25 | 1/3" | 0,014 ms | AR0134 | Kolor |
| MV-123GM-GE | 1,2 MP | CMOS | Globalne | 1280×960 | 3,75 μm | 60.75 | 1/3" | 0,016 ms | AR0135 | MONO |
| MV-130RC-GE | 1,2 MP | CMOS | Wyrzucanie | 1280×960 | 3,75 μm | 60.5 | 1/3" | 0,016 ms | AR0130 | Kolor |
| MV-133GM-GE | 1.3MP | CMOS | Globalne | 1280×1024 | 4 mikrometry | 91 | 1/2.7" | 0,0061 milisekundy | SC130GS | MONO |
| MV-134GC-GE / M | 1.3MP | CMOS | Globalne | 1280×1024 | 4,8μm | 91.5 | 1/2" | 0,008 ms | PYTON | Kolor/Mono |
| MV-200RC-GE | 2MP | CMOS | Wyrzucanie | 1920×1080 | 2,9 μm | 30 | 1/2.8" | 0,02 ms | SONY | Kolor |
| MV-200GC-GE/M | 2MP | CMOS | Globalne | 1600×1200 | 4,5 μm | 60 | 1/1,8" | 0,015 ms | EV76C570 | Kolor/Mono |
| MV-230GC-GE/M | 2MP | CMOS | Globalne | 1920×1200 | 4,8μm | 51 | 2/3" | 0,005 ms | PYTHON2000 | Kolor/Mono |
| MV-203GC-GE/M | 2MP | CMOS | Globalne | 1600×1200 | 4,5 μm | 61.5 | 1/1,7" | 0,0126 ms | IMX430 | Kolor/Mono |
| MV-231GC-GE/M | 2,3 MP | CMOS | Globalne | 1920×1200 | 5,86 μm | 40.25 | 1/1,2" | 0,02 ms | IMX249 | Kolor/Mono |
| MV-232GC-GE/M | 2,3 MP | CMOS | Globalne | 1920×1200 | 3μm | 52 | 1/2,6" | 0,014 ms | AR0234 | Kolor/Mono |
| MV-300GC-GE/M | 3MP | CMOS | Globalne | 2048×1536 | 3,45 μm | 38 | 1/1,8" | 0,016 ms | IMX265 | Kolor/Mono |
| MV-500GC-GE/M | 5MP | CMOS | Globalne | 2448×2048 | 3,45 μm | 24 | 2/3" | 0,019 ms | IMX264 | Kolor/Mono |
| MV-501RC-GE/M | 5MP | CMOS | Wyrzucanie | 2592×1944 | 2,2μm | 24 | 1/2,5" | 0,02 ms | AR0522 | Kolor/Mono |
| MV-502GC-GE/M | 5MP | CMOS | Globalne | 2592×2048 | 4,8μm | 23 | 1" | 0,005 ms | PYTHON5000 | Kolor/Mono |
| MV-535GC-GEM | 5MP | CMOS | Globalne | 2592×2048 | 3,2 μm | 22 | 2/3" | 0,042 ms | XGS5000 | Kolor/Mono |
| MV-630RC-GE/M | 6,3 MP | CMOS | Wyrzucanie | 3088×2064 | 2,4 μm | 18.75 | 1/1,8" | 0,025 ms | IMX178 | Kolor/Mono |
| MV-800RC-GE/M | 8MP | CMOS | Wyrzucanie | 3840×2160 | 2,0 μm | 14.25 | 1/1,8" | 0,062 ms | OEM | Kolor/Mono |
| MV-1000RC-GE/M | 10MP | CMOS | Wyrzucanie | 3664×2748 | 1,67μm | 8 | 1/2,3" | 0,043 ms | MT9J003 | Kolor/Mono |
| MV-1200RC-GE/M | 12MP | CMOS | Wyrzucanie | 4000×3000 | 1,85μm | 9.75 | 1/1,7" | 0,01 ms | IMX226 | Kolor/Mono |
| MV-1202RC-GE/M | 12MP | CMOS | Wyrzucanie | 4000×3000 | 1,6μm | 9.75 | 1/2" | 0,034 ms | AR1202 | Kolor/Mono |
| MV-1600RC-GE/M | 16MP | CMOS | Wyrzucanie | 4608×3546 | 1,34μm | 7 | 1/2,3" | 0,039 ms | IMX206 | Kolor/Mono |
| MV-2001RC-GE/M | 20MP | CMOS | Wyrzucanie | 5488×3672 | 2,4 μm | 6 | 1" | 0,044 ms | IMX183 | Kolor/Mono |
| MV-D32C-GE/M | 0,3 MP | CCD | Globalne | 640×480 | 7,4 μm | 164.75 | 1/3" | 0,0001 ms | Sharp | Kolor/Mono |
| MV-D125C-GE/M | 1.3MP | CCD | Globalne | 1280×960 | 3,75 μm | 43.5 | 1/3" | 0,0001 ms | Sharp | Kolor/Mono |
| MV-D200M-GE/C | 2MP | CCD | Globalne | 1600×1200 | 4,4 μm | 27.5 | 1/1,8" | 0,0001 ms | Sharp | Kolor/Mono |
| MV-D500C-GE/M | 5MP | CCD | Globalne | 2448×2048 | 3,45 μm | 9.25 | 2/3" | 0,0001 ms | Sharp | Kolor/Mono |
| MV-C404RC-GE/M | 4MP | CMOS | Wyrzucanie | 2048×2048 | 5,94 μm | 27 | 1,1" | 0,017 ms | OEM | Kolor/Mono |
| MV-C501RM-GE | 5MP | CMOS | Wyrzucanie | 2640×1968 | 6,6 μm | 21.5 | 4/3" | 0,011 ms | OEM | MONO |
| MV-C1206C-GE/M | 12MP | CMOS | Globalne | 4112×3088 | 3,5 μm | 9.25 | 1,1" | 0,0327 ms | QEM | Kolor/Mono |
| MV-C1606GC-GE/M | 16MP | CMOS | Globalne | 4112×4112 | 3,5 μm | 7.25 | 4/3" | 0,0327 ms | OEM | Kolor/Mono |
| MV-S507C-GE/M | 5MP | CMOS | Globalne | 2448x2048 | 3,4 μm | 24 | 2/3" | 0,0201 ms | GMAX3405 | Kolor/Mono |
| MV-F401C-GE/M | 4MP | CMOS | Globalne | 2048×2048 | 5,5 μm | 29 | 1" | 0,016 ms | OEM | Kolor/Mono |
| MV-F880GC-GE/M | 8,9 MP | CMOS | Globalne | 4096×2160 | 3,45 μm | 13.5 | 1" | 0,034 ms | IMX304 | Kolor/Mono |
| MV-F1202GC-GE/M | 12MP | CMOS | Globalne | 4090×3000 | 3,45 μm | 9.5 | 1,1" | 0,034 ms | IMX304 | Kolor/Mono |
| MV-F1205C-GE/M | 12MP | CMOS | Globalne | 4096×3072 | 3,2 μm | 9.5 | 1" | 0,031 ms | XGS12000 | Kolor/Mono |
| Proszę o kontakt z nami, aby dowiedzieć się więcej modeli! | ||||||||||
| Model | Mv-2100rc-ge/m |
| Transduktor | 1 cm, cm, imx183 |
| Ostrze | Wyrzucanie |
| Kolor | Kolor/Mono |
| Rozmiar piksela | 2,4x2,4μm |
| Efektywne piksele | 20MP |
| Rozdzielczość @ liczba klatek na sekundę | /[email protected] |
| Głębia bitowa pikseli | 12bit |
| Czułość | 462 mV 1/30s, 388 mV 1/30s |
| Port wprowadzania/wyjścia | 1 wejście optyczne, 1 wyjście optyczne; 3 wejścia, 4 wyjścia |
| Synchronizacja | Ciągły / wyzwalacz programowy / wyzwalacz sprzętowy |
| Maksymalny zysk | 22 |
| Czas ekspozycji ((ms) | 0,016-4194,3 |
| Filtr | Standardowy filtr odcinający podczerwień 650 nm/Standardowa dwustronna folia z ulepszoną technologią AR |
| Puffer ramy | 128m bajtów |
| Dane niestandardowe aparatu | 2K bajtów |
| Format wyjścia wideo | Bayer8, Mono8 |
| Protokół standardu wizualnego | GigE Vision V1.2, GenICam |
| Wstawienie obiektywu | C-mount jest domyślny, opcjonalny interfejs C lub CS (może zapewnić Akcesoria do interfejsu transferu obiektywu M12) |
| Interfejs danych | Interfejs RJ45 Gigabit Ethernet, z tyłu kompatybilny ze standardem sieci 100M |
| Wymagania dotyczące mocy | 9~24V (POE jest opcjonalne) |
| Zużycie energii | < 2,66 w |
| Wymiary | 2 9 (m m) x 29 (m m) x 40 (m m)) ((z wyłączeniem podstawy obiektywu i tylnych przyczep) |
| Waga | < 60 g |
| Temperatura pracy | 0 ~ 5 0 ° C |
| Wilgotność pracy | 20-80% (nie kondensujące) |
| Temperatura przechowywania | -30-60 ° C |
| Wilgotność przechowywania | 20-95% (nie kondensujące) |
| System wsparcia | Systemy 32&64-bitowe WINXP, WIN7/8/10, sterowniki Linux i ARM oraz sterowniki platformy Android (Wykonalne) |
| Kierowcy | Komponenty DirectShow Komponenty specjalne Halcon Dysk dedykowany Labview Komponenty OCX Komponenty TWAIN |
| Język programowania wstępnego | Języki: C++, C#, VB6, VB.NET, Delphi, BCB, Python |
| Sterowanie programowalne | Rozmiar obrazu (ROI), kamera, czas ekspozycji, GAMMA, kontrast, jasność, niestandardowa tabela LUT, odbicie lustrzane, wzmocnienie koloru RGB, nasycenie, ostrość, kolor na mono, korekcja temperatury barwowej, antykolor, tryb Color.trigger, kontrola liczby klatek na sekundę |
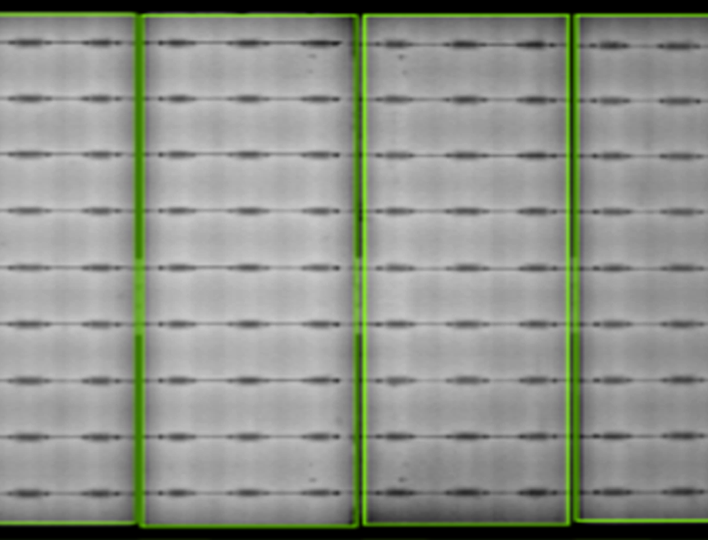
Wykrywanie defektów EL ogniw słonecznych
Do typowych wad akumulatora należą: wirtualne spawanie, pęknięcia, fragmentacja i tak dalej. Bezpośrednio wpływają na moc podzespołu, skracają żywotność podzespołu lub powodować złom. Ręczne wykrywanie ma niską wydajność i duże pominięte wykrywanie szybkość, a algorytm głębokiego uczenia się wykrywania obiektów jest bardziej wydajny.
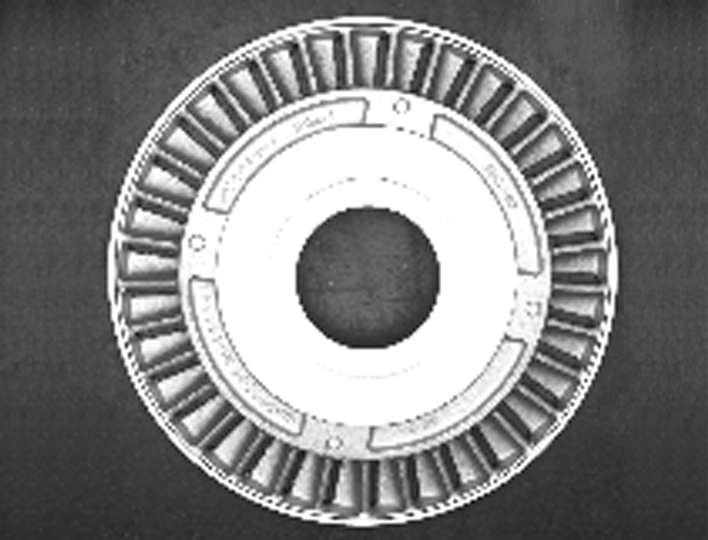
OCR anty-mieszający do stojana silnika samochodowego
Istnieje wiele rodzajów produktów na linii produkcyjnej stojana silnika samochodowego i konieczne jest zidentyfikowanie cech i cech produktów, aby określić model produktu. Gdy okaże się, że różne modele są mieszane, emitowany jest sygnał alarmowy.
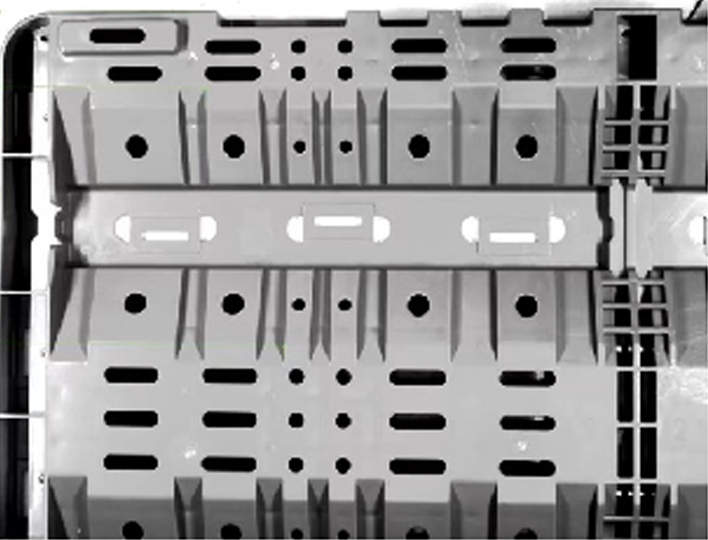
Pomiar wymiarów palety
Rozmiar produktu w tacce wynosi 1m*1m, należy zmierzyć wymiar zewnętrzny produktu i rozmiar wnętrza rowu, a dokładność musi wynosić ±1mm.Użyć układu 4-kameryjnego, aby pokryć cały produkt.

Śruby pozycjonujące wielootworowe i dopasowanie pozycjonujące produktu
Poprawiając obrazowanie w celu znalezienia środka konturu i dodając kompensację, kamera może zrealizować śrubę wielu otworów jednocześnie. Następnie użyj kalibracji szachownicy i metody odczytu, ustalona pozycja pokrywy produktu jest zasysana i dopasowywana do produktu.
Q1. Mogę prosić o próbkę kamery? ?
O: Tak, zamówienia na próbki i wszelkie zamówienia są akceptowane.
Q2. Jaki jest czas realizacji?
Odp.: 3-5 dni dla zamówień próbkowych/małych (<50 sztuk), 1-2 tygodnie dla zakupów hurtowych (>50 sztuk).
Q3. Jaki jest MOQ dla kamery skanującej obszar ?
A: MOQ to 1 sztuk.
- Q4. Jaki jest termin dostawy i jak długo to potrwa?
O: Zazwyczaj wysyłamy za pomocą DHL, UPS, FedEx lub TNT. Zwykle to zajmuje 5-7 dni drogą lotniczą. Wypłata morska jest również dopuszczalna.
- Q5. Jak zamówić kamerę skanującą obszar ?
A: 1. Potwierdzenie rozdzielczości kamery, wielkości czujnika, interfejsu;
2. Wykorzystanie Potwierdzenie rozdzielczości obiektywu aparatu, wielkości czujnika, ogniskowej, logo, interfejsu;
3. Wykorzystanie Potwierdź zamówienie i ofertę;
4. Wykorzystanie Płacenie zleceń i organizowanie produkcji;
5. Nie. Sprawdź produkt i zorganizuj dostawę.
Q6. - Popierasz prywatne wytwórnie?
A: Tak, mamy.
P7: Jak długo jest gwarancja na produkt?
O: Oferujemy 2-5 lat gwarancji na nasze produkty.
P8: Jak radzić sobie z wadliwymi produktami?
A: 1, Nasze produkty są produkowane w ścisłym systemie kontroli jakości z 0,2% wadliwy wskaźnik.
2, Jeśli w okresie gwarancji wystąpią uszkodzenia, usterki lub błędy niezwiązane z sztucznymi czynnościami, klienci mogą skorzystać z naprawy, wymiany lub częściowego/pełnego zwrotu.
MV-2100RCM-GE(Specifications & Drawings).pdf
pobierz