
Грузовик будет перевозить поддоны, полные материалов, в зону разгрузки, а после разгрузки погрузчиком, он будет перевезен непосредственно на станцию 3D-манипулятора для сортировки и разборки. После завершения работы AGV будет использоваться для сотрудничества с транспортировкой на соответствующую рабочую станцию.
Поделиться
1). Контекст проекта:
Требования заказчика:
Определение и разбор контейнеров разных размеров.
Проблемы заказчика:
1. Смешанная идентификация коробок разных размеров, определение соответствующего направления захвата на основе положения и размера коробки.
2. Экспозиция меняется в реальном времени от утра до вечера (при солнечной или облачной погоде), необходимо повысить точность распознавания продукта и стабильность системы.
2). Архитектура решения:
Общий процесс:

Ключевые модули процесса:
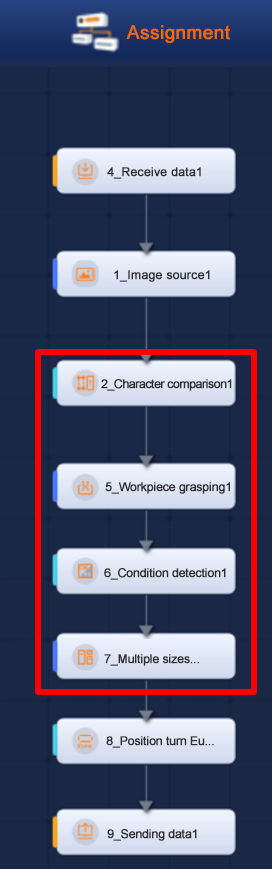
Сравнение символов: Установите соответствующую команду сопоставления, которая используется для логического запуска последующего обнаружения модуля.
Захват детали: Нарисуйте область RGB-изображения, где должна быть захвачена деталь, с учетом того, что диапазон выбора рамки должен выходить за пределы внешнего края фактической рамки.
Обнаружение условий: Определите, распознается ли продукт, и отправьте соответствующие сигналы логики OK/NG на основной компьютер.
Многоформатная коробка: Настройте соответствующие параметры типа паллетизации коробок различных размеров и выполните задачу депаллетизации, используя пример для сегментации алгоритмической модели, соберите изображения различных положений размещения продукции для обучения модели.
2). Преимущества программы:
1. При больших изменениях экспозиции изображение остается четким, а распознавание стабильно, время от получения сигнала до вывода данных составляет 3,5 секунды.
2. Для коробок различных размеров и цветов достигается 100% точность распознавания.
3. для достижения непрерывного производства 24/7, эффективность мощности увеличена на 100%.
4. станция механического управления с 3D-RGBD может заменить 5 человек.









