Материалы рассеиваются через вибрирующий диск, и материалы, которые отвечают требованиям, сначала просматриваются по виду, а затем визуально позиционируются
Поделиться
1). Контекст проекта:
Описание требования:
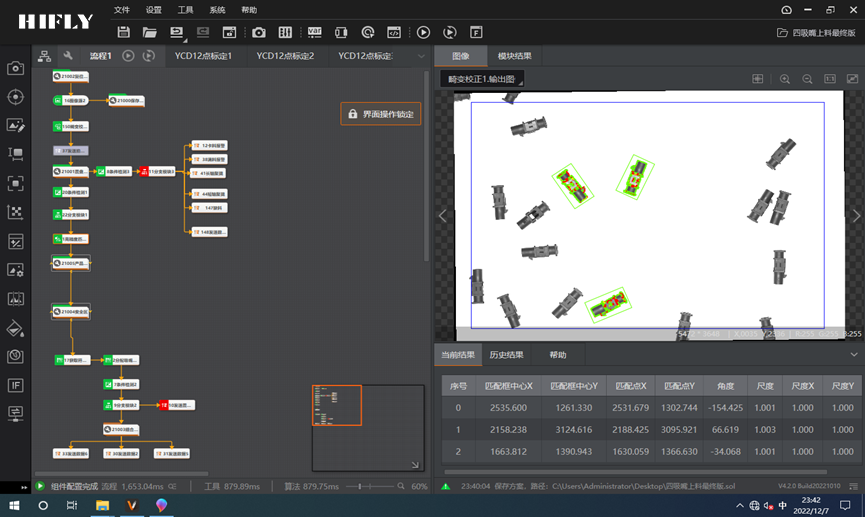
Проект использует платформу разработки алгоритмов VM для реализации загрузки и захвата различных материалов. Материалы рассеиваются через вибрирующий диск, и материалы, соответствующие требованиям, сначала фильтруются с помощью зрения, а затем визуально позиционируются. Сложность проекта заключается в том, как оптимизировать точность захвата на 360 градусов для совместимых специальных деталей.
Технические требования:
(1) Достижение поглощения продукта на вибрирующем диске, точность позиционирования ±0,25 мм
(2) Определение направления материала и различение левого и правого направлений
(3) Необходимо отфильтровать верхнее и нижнее направление материала, не для верхней стороны нельзя хватать
(4) Функция безопасной зоны должна фильтровать материалы, близкие к вибрирующему диску
(5) Необходимо отфильтровать смесь, не для одинаковых материалов нельзя хватать
2). Архитектура решения:
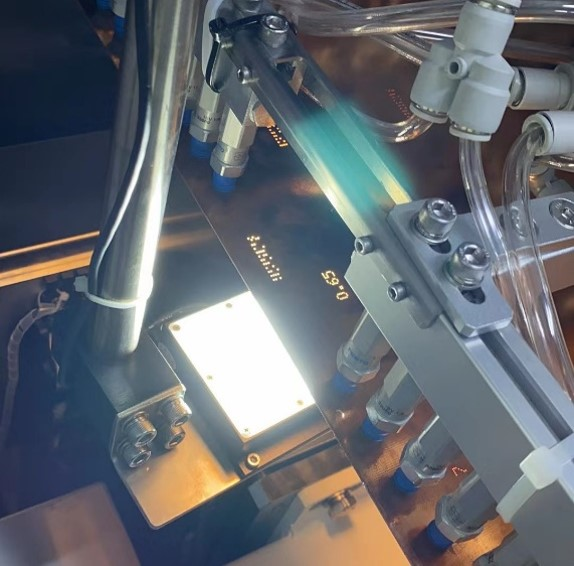
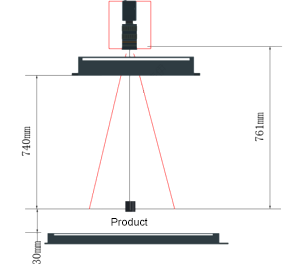
Схема использует передний источник света и задний свет, печатает контур материала и сочетается с объективом FA для удовлетворения потребностей в большом рабочем расстоянии и большой глубине резкости.
3). Преимущества программы:
1. реализована функция автоматической подачи формованных деталей, а коэффициент пропусков менее 0,1%
2. Хорошие показатели обработки алгоритмов визуальных изображений VM, работа совместно с высокоскоростным манипулятором клиента для забора материалов позволяет достичь скорости подачи 7200 шт/ч
3. Стандартное программное обеспечение платформы алгоритмов VM, не требующее сложного программирования, не нуждающееся в программистах-специалистах по созданию проекта, что снижает для предприятий сложность разработки и затраты на послепродажное обслуживание