

Vet du vad förvrängning är i maskinvision?
Har du någonsin stött på en förvrängd bild? Ett objekt som borde ha varit rakt blir krökt, till och med kanterna blir krökta. Detta orsakas faktiskt av linsförvrängning, vilket gör att objektets bild blir förvrängd, men det påverkar inte skärpan.
Det finns två huvudsakliga typer av optisk förvrängning i maskinvissystem: radial förvrängning och tangentiell förvrängning. Att förstå deras orsaker, effekter och korrektionsmetoder är avgörande för att säkerställa pålitliga visuella inspektionsresultat.
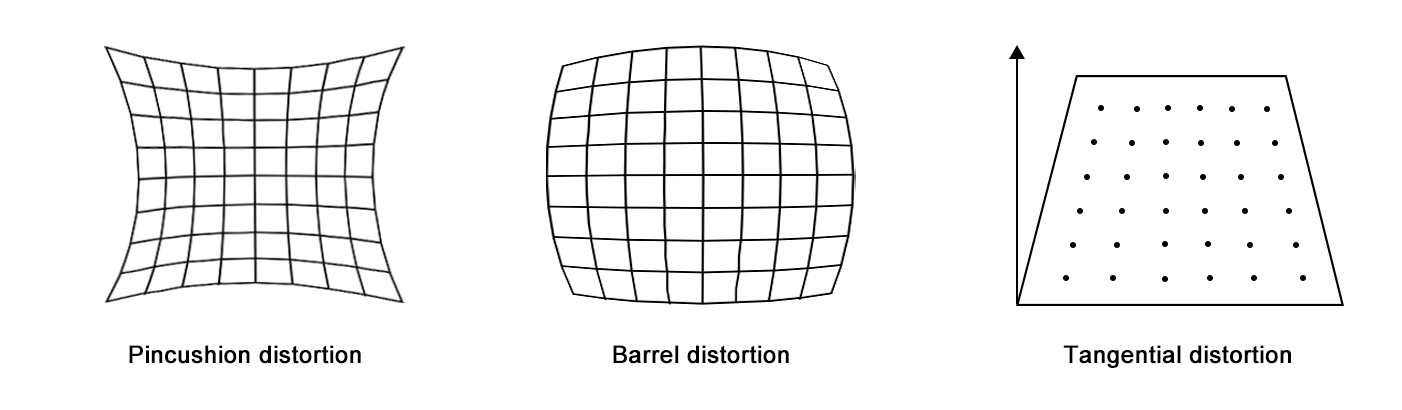
1. Radial distortion och tangential distortion
Bland dessa är den förvrängning som orsakas av att linsen inte är parallell med bildytan på grund av monteringsfel kallad tangential distortion, vilket kommer att orsaka att mitten och kanterna av bilden blir förvrängda, och de horisontella eller vertikala linjerna i bilden kommer att bli krökta. Radial distortion orsakas av formen och processen hos linsen. Ju närmare kanten på linsen, desto allvarligare blir förvrängningen. Generellt sett kallas konvex radial distortion för fattdistortion, och den konkava för kuddistorption.
2. Nödvändigheten av Förvrängningskorrektion
I tillämpningar som beror på precision, som industriell mätteknik eller automatiserad kvalitetskontroll, kan okorrigerade förvrängningar leda till katastrofala mätfel. En avvikelse på bara några pixlar kan översättas till betydande dimensionella fel i verkligheten. Därmed blir förvrängningskorrektion oumbärlig för bildbaserade beslutsstödsystem.
3. Hybrida korrektionsstrategier
Eftersom förvridning är en inhärdig karaktäristik hos optiska system blijver fullständig eliminering otillgänglig. Dock kan en kombination av maskinjusteringar och beräkningsmetoder minska dess påverkan:
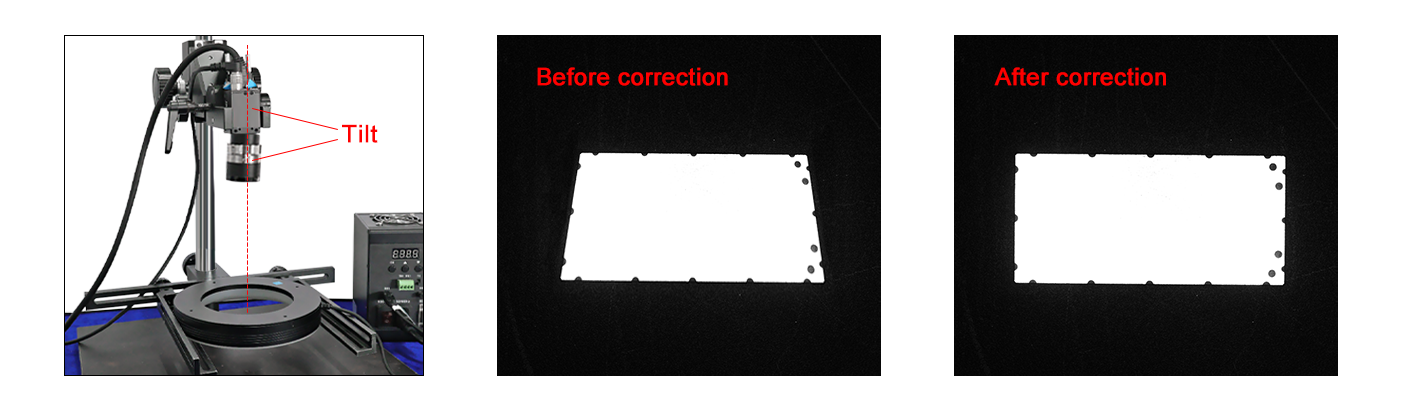
Hårdvarulösningar för tangentiell förvridning
Att hantera tangentiell förvridning involverar främst mekanisk omkalibrering. Genom att återpositionera linsen för att uppnå perfekt parallellitet med sensorn.
Programvarulösningar för radial förvridning
Radial distortion korrigeras vanligtvis genom programvara. Distortionkoefficienten för linsen beräknas och bearbetas sedan av programvara.
Genom kamerakalibrering (t.ex. med schackbrädsmönster) beräknas dessa parametrar och tillämpas för att omvandla de förvrängda pixlarna till deras teoretiska positioner.
C slutsats: Balans mellan optik och beräkning
Även om linsdistorsioner utgör bestående utmaningar inom maskinvision kan deras effekter hanteras systematiskt. Tangentiell distortion kräver noggrann hårdvarujustering, medan radial distortion kräver avancerad programvarukorrigering. Genom att kombinera båda metoderna kan ingenjörer återställa geometrisk exakthet i bilderna och se till att visionsystemen levererar den nödvändiga noggrannheten i moderna industriella tillämpningar.





