กล้องสเตอริโออัจฉริยะ RGB-D ที่มีแกนการเรียนรู้เชิงลึกในตัวถูกจับคู่กับหุ่นยนต์ และผ่านการรวมกันอย่างเป็นระบบของอัลกอริธึมการเรียนรู้เชิงลึกและอัลกอริธึมวิชั่นแบบดั้งเดิม ทำให้หุ่นยนต์สามารถคว้าสิ่งของได้อย่างมีประสิทธิภาพตลอดเวลา
แบ่งปัน
1). หลังจากการโครงการ:
คำอธิบายความต้องการ:
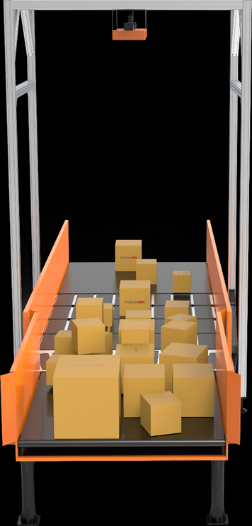
1. ใช้การควบคุมด้วยสายพานและการมองเห็นแทนการจ่ายด้วยมือ
2. ต้องเข้ากันได้กับกล่องกระดาษ ถุงนิ่ม ถุงผิวงูกะบิด ซอง และประเภทของแพ็คเกจอื่นๆ
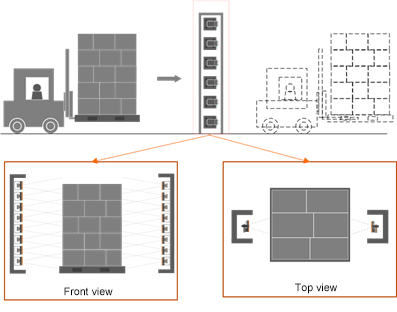
3. ต้องสามารถทำตำแหน่ง การแยก และฟังก์ชันการยกออกจากกองของแพ็คเกจได้
4. ตรวจสอบให้แน่ใจว่าแพ็คเกจไม่ถูกซ้อนหรือเกินจำนวนและผ่านไปทีละชิ้น
ข้อกำหนดทางเทคนิค:
1. ช่วงความสูงของแพ็คเกจ: 10~500 มม.
2. เวลาประมวลผลแบบเรียลไทม์ ≤100ms.
3. อัตราความสำเร็จในการแยก > 99%.
4. ประสิทธิภาพการประมวลผลของระบบ > 4000 ชิ้น/ชั่วโมง.
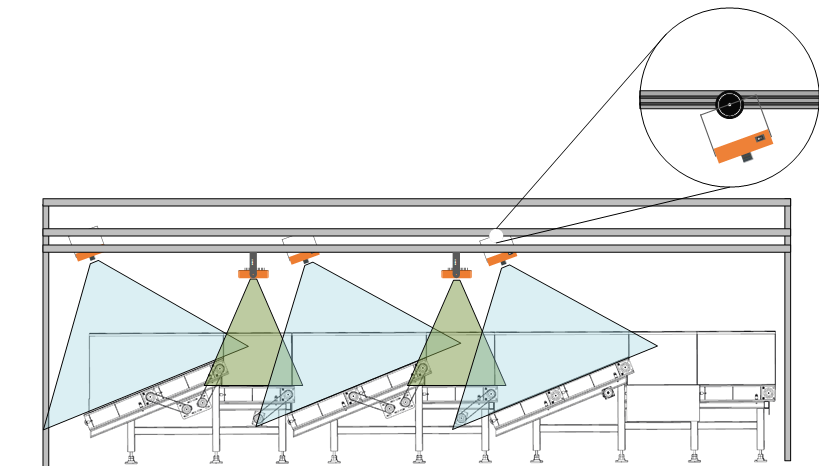
2). สถาปัตยกรรมของโซลูชัน:
มุ่งเน้นแก้ปัญหาเรื่องต้นทุนสูง การซ้อนแพ็คเกจ และประสิทธิภาพต่ำ ระบบการถอดซ้อนแบบปีนเขาใช้โซลูชันกล้องอุตสาหกรรมสี + เครื่องโฮสต์ประสิทธิภาพสูงและการใช้ขั้นตอนการเรียนรู้เชิงลึกเพื่อทำการระบุตำแหน่งแพ็คเกจอย่างแม่นยำสำหรับแพ็คเกจจำนวนมากที่ซ้อนกันและฉากที่ซับซ้อนหลากหลาย จากนั้นควบคุมสายพานเพื่อดำเนินคำสั่งในการแยกแพ็คเกจ ส่วนหลังจากการซ้อนสามารถเชื่อมโยงกับการแยกชิ้นเดียว การปรับสองด้านและการอ่านหลายด้าน เพื่อให้บรรลุการอ่านแพ็คเกจและการจัดเรียงอัตโนมัติ ลดจำนวนพนักงานจริงและเพิ่มประสิทธิภาพ
3). ข้อดีของโปรแกรม:
1. การวางแผนทางวิทยาศาสตร์: ระบบควบคุมอัจฉริยะที่พัฒนาขึ้นเอง การจัดเรียงควบคุมแพ็คเกจที่เหมาะสมที่สุด เพื่อให้มั่นใจในการแยกแพ็คเกจที่ซ้อนกันอย่างมีประสิทธิภาพ ลดแรงกดดันจากความผิดพลาดในขั้นตอนหลัง
2. ลดพนักงานและเพิ่มประสิทธิภาพ: แต่ละชุดของระบบปีนและกองสินค้าแทนแรงงาน 2 คน ประสิทธิภาพสูงสุดใกล้เคียงกับ 2000 ชิ้น/ชั่วโมง เพื่อตอบสนองความต้องการในการจัดเรียงแบบครอสเบลท์เต็มรูปแบบ
3. มั่นคงและน่าเชื่อถือ: โดยอาศัยอัลกอริธึมการเรียนรู้อย่างลึกซึ้ง ไม่กลัวแพ็กเกจที่ซับซ้อน เช่น ถุงนุ่ม ถุงสีดำ และซองจดหมาย และให้การระบุตำแหน่งที่แม่นยำ
4. ความสามารถในการขยายตัวสูง: ส่วนหลังสามารถเชื่อมต่อกับอุปกรณ์อัตโนมัติอื่นๆ เช่น การแยกชิ้นเดียว EDP การอ่านหกด้าน เพื่อดำเนินการชุดโซลูชันอัตโนมัติสำหรับแพ็กเกจแบบเทปข้ามได้อย่างสมบูรณ์