
Kamyon, malzeme dolu paleti boşaltma alanına taşıyacak ve çatal kaldırıcı aracıyla boşaltıldıktan sonra, doğrudan sıralama ve yığılma için 3D manipülatör istasyonuna taşınacak. Bittikten sonra, AGV, ilgili çalışma istasyonuna ulaşımla işbirliği yapmak için kullanılacak.
Paylaş
1) Proje geçmişi:
Müşteri talebi:
Farklı boyutlarda kutuları tanımlamak ve sökmek.
Müşteri sorunları:
1. Kutunun farklı boyutları, kutunun çıkışının konumuna ve boyutuna göre, tutma yönüne göre değişir.
2. maruziyet, sabahdan akşama (güneşli veya bulutlu) gerçek zamanlı olarak değişir ve ürünün tanıma hızını ve sistemin istikrarını geliştirmek gerekir.
2) Çözüm mimarisi:
Toplam süreç:

Ana süreç modülleri:
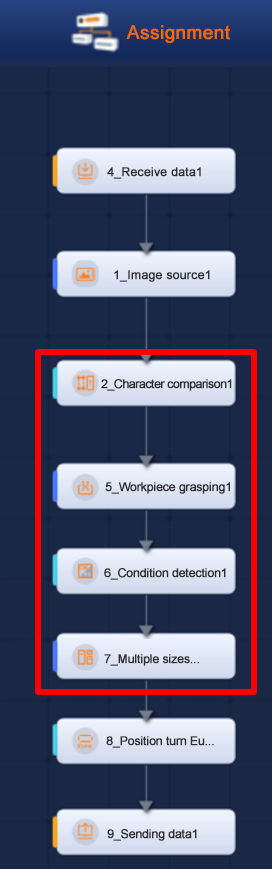
Karakter karşılaştırması: Sonraki modül algılamasını mantıksal olarak tetiklemek için kullanılan karşılık gelen eşleşme komutunu belirleyin.
Iş parçası yakalama: iş parçasının yakalanması gereken rgb görüntüsünün alanını çizmek, kutu seçimi kapsamının gerçek çerçevenin dış kenarının ötesinde olması.
Durum algılama: ürünün tanınıp tanınmadığını belirler ve ilgili ok/ng mantık sinyallerini ana bilgisayara gönderir.
Çok boyutlu kutu: çeşitli boyutlarda kutu paletleme türünün ilgili parametrelerini yapılandırır ve paletlemeyi kaldırma görevini yerine getirir, algoritma modelini segmentlemek için örneği kullanır, model eğitimi için çeşitli ürün yerleştirme pozisyonlarının resimlerini toplar.
2) Program avantajları:
1. Büyük pozlama değişiklikleri varsayımında görüntü net olabilir ve tanıma istikrarlıdır ve alınan sinyalden çıkış verisine kadar olan zaman 3,5 saniye.
2. çeşitli boyutlar için, malzeme kutusunun renkleri %100 tanıma oranına ulaşmak için.
3. 24/7 kesintisiz üretim elde etmek için, kapasite verimliliği %100 arttı.
4. 3D-rgbd mekanik manuel bir istasyon 5 kişi gücünün yerini alabilir.









