Bu projenin kalite denetimi bölümünde, PCB kartındaki lehimli eklemlerin iyi temas halinde olup olmadığını değerlendirmek ve problemli ürünleri ortadan kaldırmak için, lehimli eklemlerin her iki ucunu da iki probla dürtmekle voltaj ölçülür.
Paylaş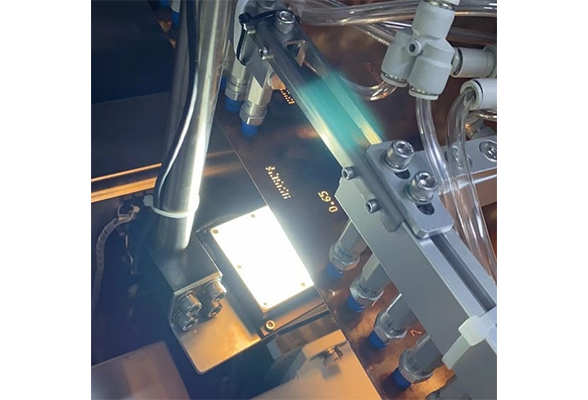
1) Proje geçmişi:
Gereksinimlerin açıklaması:
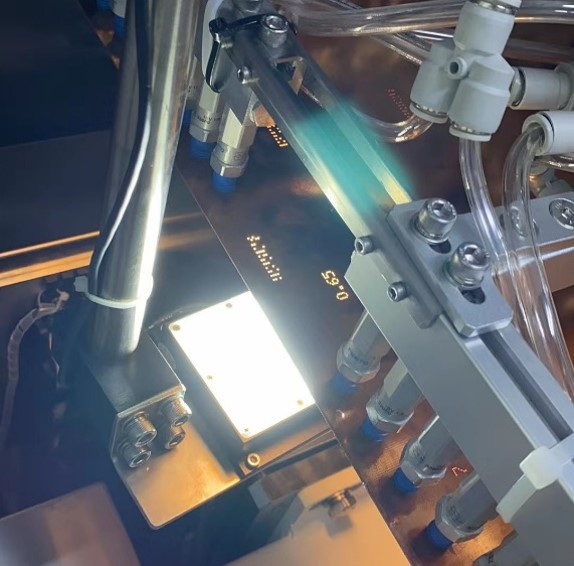
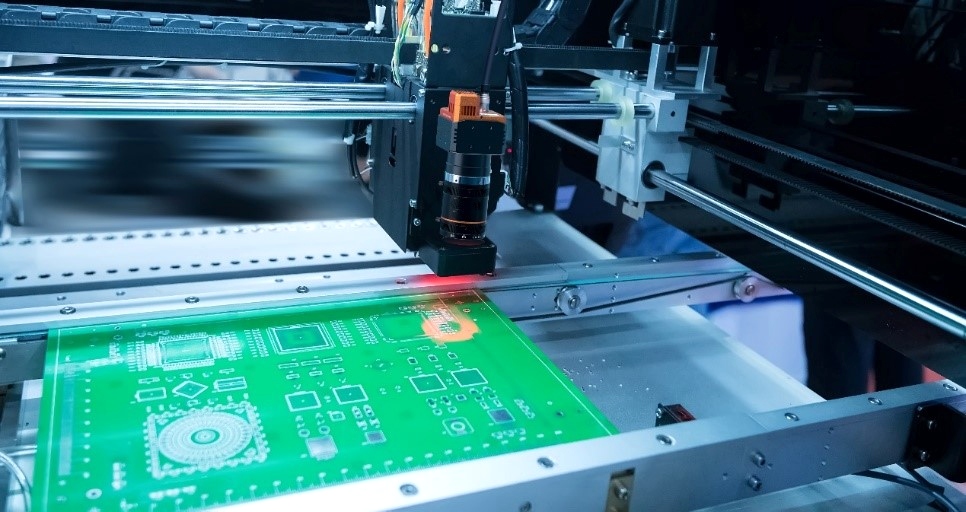
Önce, pcb kartı üst kamera tarafından fotoğraflanır ve kaba bir konumlandırma için ölçülmesi gereken lehim eklemlerinin koordinatları verilir. daha sonra iki manipülatör sırasıyla lehim eklemini fotoğraflamak için ilgili koordinatlara bir sonda taşır, kesin konumlandırma yapar ve sonra lehim eklemini birlikte sokar.
Ağrı noktaları ve sorunları:
1.Geleneksel şema kullanıldığında, kamera, lens, ışık kaynağı, ışık kaynağı denetleyici ve diğer maliyetler daha yüksek.
2.Geleneksel sistem karmaşık bir süreç, yerinde hata ayıklama personeli için yüksek gereksinimler ve yüksek işgücü maliyetine sahiptir.
3.Geleneksel çözümün hata ayıklama süresi uzun ve hızlı bir şekilde başlatılamaz.
2) Çözüm mimarisi:
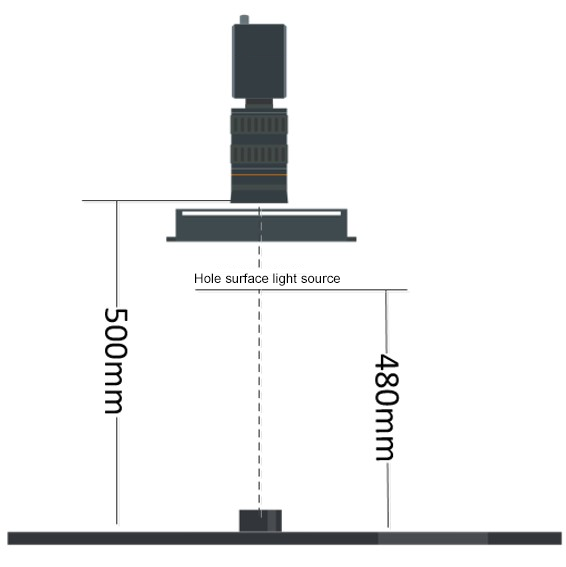
Ereksiyon şeması:
Hata ayıklama işlemi:
1. manipülatör kalibrasyon sayfasını taşır ve PCB kartıyla aynı yüksekliği korur. kamerada fotoğraf çekir, süreci vm ile oluşturur, manipülatörün fiziksel koordinatlarını TCP iletişim protokolü ile alır ve dokuz nokta otomatik kalibrasyonu gerçekleştirir.
2. Robot kolu, kalibrasyon tahtasını çekmek, nokta damgasını yapmak ve dokuz noktanın görüntüleri ve fiziksel koordinatları üzerinden kalibrasyon dosyaları oluşturmak için akıllı bir kamera taşır.
3. PCB kartı konumu robot koluna gönderilir ve robot kolu, lütleme eklemini fotoğraflamak için akıllı kamerayı ilgili konuma taşır
4. akıllı kamera her bir lehimli eklem konumunu sıraya göre çerçevelemek için nokta aramasını kullanır, koordinatları kalibre eder ve sıralama elde etmek için dönüştürür
5.Akıllı kameranın kalibrasyon fotoğraf pozisyonu ile üretim fotoğraf pozisyonu arasındaki farkı yaptıktan sonra, her bir lehimli eklemin gerçek konumunu almak için lehimli eklem kalibrasyon dönüşüm değerini ekleyin
3) Program avantajları:
1. iki tarafta manipülatörlerin koordinatlarını doğrudan fotoğraflamak için üst kamerayı kullanın ve iki manipülatör, kalibrasyon ve dönüşüm yoluyla fotoğraf çektikten sonra doğrudan hedefe ulaşır ve manipülatör hareketinin zamanını büyük ölçüde tasarruf eden sırayla gitmeye gerek yoktur. tüm süreç 15 saniyeden yaklaşık 5 sani
2. arama lehimli eklemin dikdörtgen kutusunu azaltarak ve her lehimli eklemi ayrı ayrı konumlandırarak, lehimli eklemin konumuna iyi yerleştirilebilir. müşteriler, müşteri ihtiyaçlarını karşılamak için 0.1mm'lik bir doğruluk gerektirir ve mevcut doğruluk 0.05mm'ye ulaşır.
3. bu proje klasik bir akıllı kamera ve endüstriyel kamera birlikte projeyi kullanmak için, gerçek proje uygun kamera türünün gerçek ihtiyaçlarına göre seçilebilir, ve hatta müşterinin çevreye uyum sağlamak için birlikte iki, karşılıklı etki elde etmek için.
4. müşteri orijinal planı ilk fotoğraf çekildikten sonra üst kameranın karşılık gelen konumuna koordinat göndermek ve ikinci fotoğraf çekildikten sonra ikinci fotoğraf için koordinat göndermekti. mevcut plan sadece bir kez fotoğraf çekmek ve aynı anda robot kol 1 ve 2 kontrol etmek için farklı kalibrasyon dosyalarını çağırmak için ve genel verimlilik% 20 artmıştır.