
Вантажівка доставить палету, наповнену матеріалами, до зони розгрузки, а після розгрузки погружником матеріали безпосередньо пересуваються на станцію 3D маніпулятора для сортування та розгруження. Після завершення, АГВ використовується для співпраці з транспортуванням до відповідної робочої станції.
Поділитися
1). Підґрунтя проекту:
Потреби клієнта:
Визначати та розбирати контейнери різних розмірів.
Болючі точки клієнта:
1. Змішування ідентифікації коробок різних розмірів, виведення відповідного напряму хватання на основі положення та розміру коробки.
2. Експозиція змінюється в реальному часі від ранку до вечора (ясно або хмарно), необхідно покращити точність розпізнавання продукту та стабільність системи.
2). Архітектура рішення:
Загальний процес:

Ключові модулі процесу:
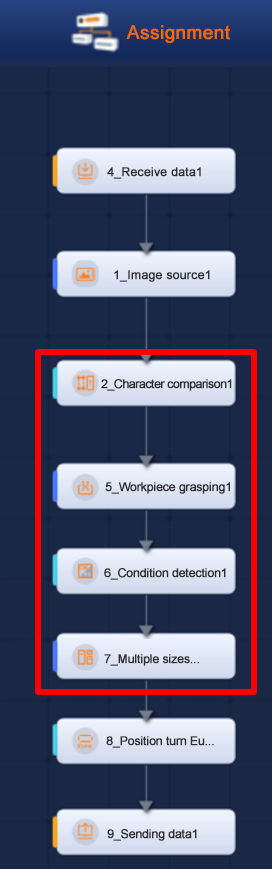
Порівняння символів: Встановіть відповідну команду збігу, яка використовується для логічного запуску подальшого виявлення модуля.
Захоплення деталей: Намалюйте область RGB-зображення, де потрібно захопити деталь, з урахуванням того, що межі вибору боксу мають виходити за межі фактичної рамки.
Виявлення умов: Визначте, чи розпізнано продукт, і надсилайте відповідні логічні сигналі OK/NG головному комп'ютеру.
Багаторозмірний ящик: настройте відповідні параметри типу палетизації ящика різних розмірів та виконайте завдання депалетизації, використовуючи приклад для сегментації алгоритмічної моделі, зібравши зображення різних положень розташування продукту для навчання моделі.
2). Переваги програми:
1. За умови великих змін експозиції, зображення може бути чітким, а розпізнавання стабільним, і час від отриманого сигналу до виведення даних становить 3,5 секунди.
2. Для ящиків різних розмірів і кольорів досягається 100% точність розпізнавання.
3. щоб досягнути неперервного виробництва 24/7, ефективність мощності збільшилася на 100%.
4. станція ручного механічного управління 3D-RGBD може замінити п'ять робочих.









