এই প্রকল্পের মান পরিদর্শন অংশে, ভোল্টেজটি দুটি প্রোব ব্যবহার করে জোড়ের জোড়ের উভয় প্রান্তকে যথাক্রমে পিক করে পরিমাপ করা হয়, যাতে PCB বোর্ডের জোড়ের জোড়গুলি ভাল যোগাযোগ রয়েছে কিনা তা বিচার করা যায় এবং সমস্যাযুক্ত পণ্যগুলি নির্মূল করা হয়।
ভাগ করে নিন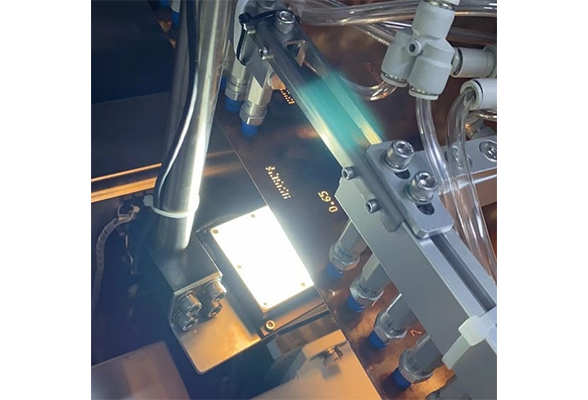
1). প্রজেক্ট পটভূমি:
প্রয়োজন বর্ণনা:
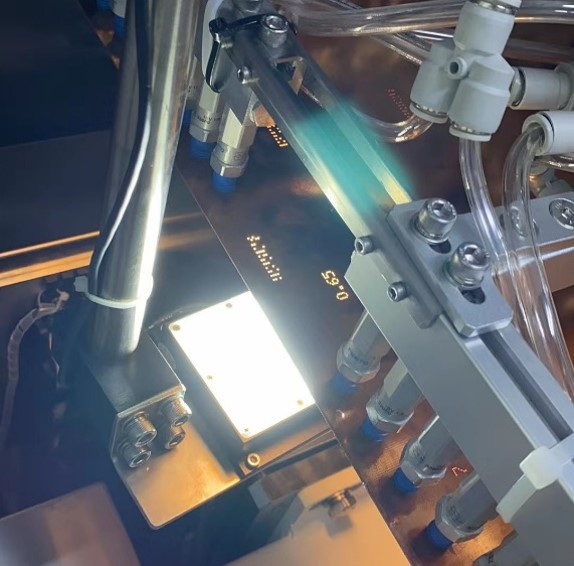
প্রথমে, পিসিবি বোর্ডটি উপরের ক্যামেরা দ্বারা ছবি তোলা হয় এবং পরিমাপ করতে হবে সেই জন্য সুড়ঙ্গের স্থানাঙ্ক দেওয়া হয় লক্ষণিক অবস্থানের জন্য। তারপর দুটি ম্যানিপুলেটর যথাক্রমে একটি প্রোবকে অবশ্যই স্থানাঙ্কে নিয়ে যায় সুড়ঙ্গের ছবি তুলতে, নির্ভুল অবস্থান করতে, এবং তারপর একসাথে সুড়ঙ্গটি চাপ দিয়ে ভোল্টেজ পরিমাপ করে এবং নির্ধারণ করে যে সুড়ঙ্গটি ভালো কিনা।
দুঃখের বিষয় এবং সমস্যাঃ
১. ঐক্যবদ্ধ পদ্ধতি ব্যবহার করে, সম্পূর্ণ সেট ক্যামেরা, লেন্স, আলোক উৎস, আলোক উৎস নিয়ন্ত্রক এবং অন্যান্য খরচ বেশি।
২. ঐক্যবদ্ধ পদ্ধতি জটিল প্রক্রিয়া রয়েছে, স্থানীয় ডিবাগিং কর্মীদের জন্য উচ্চ আবেদন, এবং উচ্চ শ্রম খরচ।
৩. ঐক্যবদ্ধ সমাধানের জন্য ডিবাগিং সময় দীর্ঘ এবং তাড়াতাড়ি চালু করা যায় না।
2). সমাধান আর্কিটেকচার:
অধিষ্ঠিত রূপরেখা:
ডিবাগিং প্রক্রিয়া:
১. ম্যানিপুলেটর ক্যালিব্রেশন শীট নিয়ে থাকে এবং PCB বোর্ডের সাথে একই উচ্চতা রखে। ক্যামেরায় ছবি তুলুন, VM দিয়ে প্রক্রিয়া তৈরি করুন, TCP যোগাযোগ প্রোটোকল মাধ্যমে ম্যানিপুলেটরের ভৌত স্থানাঙ্ক গ্রহণ করুন এবং নয়-টি বিন্দুর স্বয়ংক্রিয় ক্যালিব্রেশন করুন।
২. রোবট আর্ম একটি ইন্টেলিজেন্ট ক্যামেরা নিয়ে ক্যালিব্রেশন বোর্ডের ছবি তুলে বিন্দু-স্ট্যাম্পিং করুন এবং নয়টি বিন্দুর ছবি এবং ভৌত স্থানাঙ্কের মাধ্যমে ক্যালিব্রেশন ফাইল তৈরি করুন।
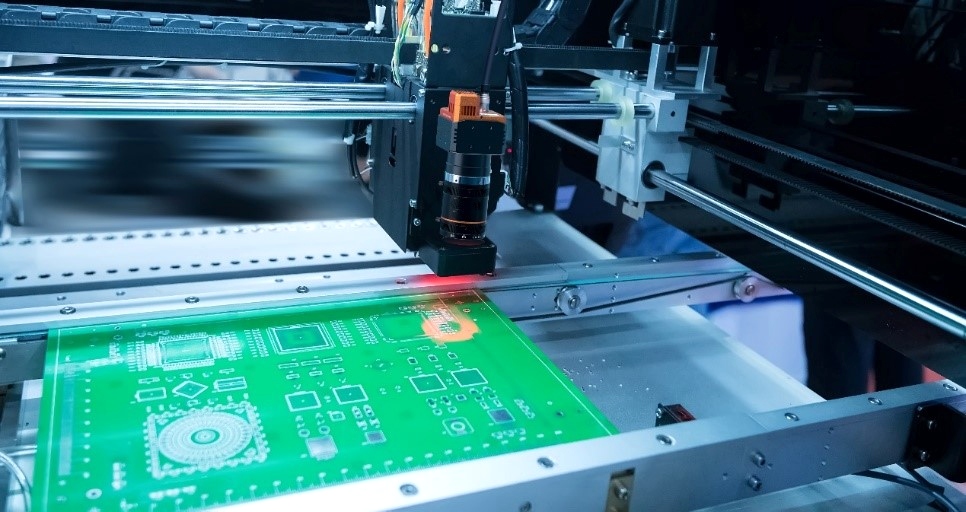
৩. PCB বোর্ডের অবস্থান রোবট আর্মে পাঠানো হয়, এবং রোবট আর্ম স্মার্ট ক্যামেরা নিয়ে অনুরূপ অবস্থানে যায় এবং সোল্ডার জয়েন্টের ছবি তুলে।
৪. স্মার্ট ক্যামেরা ব্যবহার করে বিন্দু খোঁজা দিয়ে প্রতিটি সোল্ডার জয়েন্টের অবস্থান ক্রমানুসারে ফ্রেম করুন, স্থানাঙ্ক ক্যালিব্রেট করুন এবং তা রূপান্তর করুন যাতে সাজানো যায়।
৫. স্মার্ট ক্যামেরার ক্যালিব্রেশন ছবির অবস্থান এবং উৎপাদন ছবির অবস্থানের মধ্যে পার্থক্য নির্ণয় করুন, এবং সোল্ডার জয়েন্টের ক্যালিব্রেশন রূপান্তর মান যোগ করুন যাতে প্রতিটি সোল্ডার জয়েন্টের আসল অবস্থান পাওয়া যায়।
3). প্রোগ্রামের সুবিধা:
১. উপরের ক্যামেরা ব্যবহার করে দুই পাশের ম্যানিপুলেটরের স্থানাঙ্কের ছবি তুলতে হবে, এবং ছবি তোলার পর ডাকলিব্রেশন এবং ট্রান্সফরমেশনের মাধ্যমে দুটি ম্যানিপুলেটর লক্ষ্য বিন্দুতে সরাসরি পৌঁছে যায়, এবং এটি একটি পরে অন্যটি যেতে হয় না, যা ম্যানিপুলেটরের গতির সময় অনেক সংক্ষিপ্ত করে। সম্পূর্ণ প্রক্রিয়া ১৫ সেকেন্ড থেকে প্রায় ৫ সেকেন্ডে হ্রাস পেয়েছে।
২. খোদাই যোগফল এবং প্রতিটি খোদাই যোগফলকে ব্যক্তিগতভাবে অবস্থান করার জন্য আয়তাকার বক্স হ্রাস করা হয়েছে, যা খোদাই যোগফলের অবস্থানে ভালোভাবে স্থাপন করতে পারে। গ্রাহকরা ০.১মিমি এর সटিকতা চান, এবং বর্তমান সটিকতা ০.০৫মিমি হয়েছে যা গ্রাহকের প্রয়োজন মেটাতে সক্ষম।
৩. এই প্রকল্পটি একটি শ্রেষ্ঠ স্মার্ট ক্যামেরা এবং শিল্পীয় ক্যামেরা একসাথে ব্যবহার করা হয়েছে। আসল প্রকল্পে আসল প্রয়োজনের উপর ভিত্তি করে উপযুক্ত ধরনের ক্যামেরা নির্বাচন করা যেতে পারে, এবং যেকোনো দুটি একসাথে গ্রাহকের পরিবেশে অভিযোজিত হতে পারে এবং অনুরূপ প্রভাব প্রদর্শন করতে পারে।
৪. গ্রাহকের আদি পরিকল্পনা ছিল প্রথম ছবি তুলতে গেলে উপরের ক্যামেরার জন্য স্থানাঙ্ক পাঠানো, এবং দ্বিতীয় ছবি তুলার পর দ্বিতীয় স্থানাঙ্ক পাঠানো। বর্তমান পরিকল্পনায় শুধুমাত্র একবার ছবি তুলতে হবে এবং ভিন্ন ভিন্ন ক্যালিব্রেশন ফাইল ডাকা হবে যা রোবট হাত ১ এবং ২ কে একই সাথে নিয়ন্ত্রণ করবে, এবং সামগ্রিকভাবে কার্যকারিতা ২০% বৃদ্ধি পেয়েছে।