V části kvalitní inspekce tohoto projektu se měří napětí pomocí dvou sond, které bodají na oba konce spojů, aby bylo možné posoudit, zda jsou spoje na desce PCB v dobrém kontaktu a vyřadit vadné produkty.
Sdílet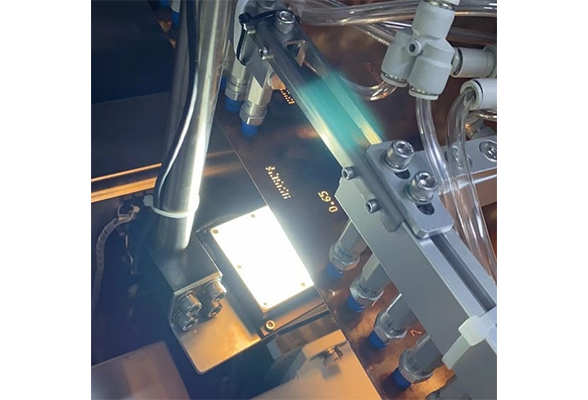
1). Pozadí projektu:
Popis požadavků:
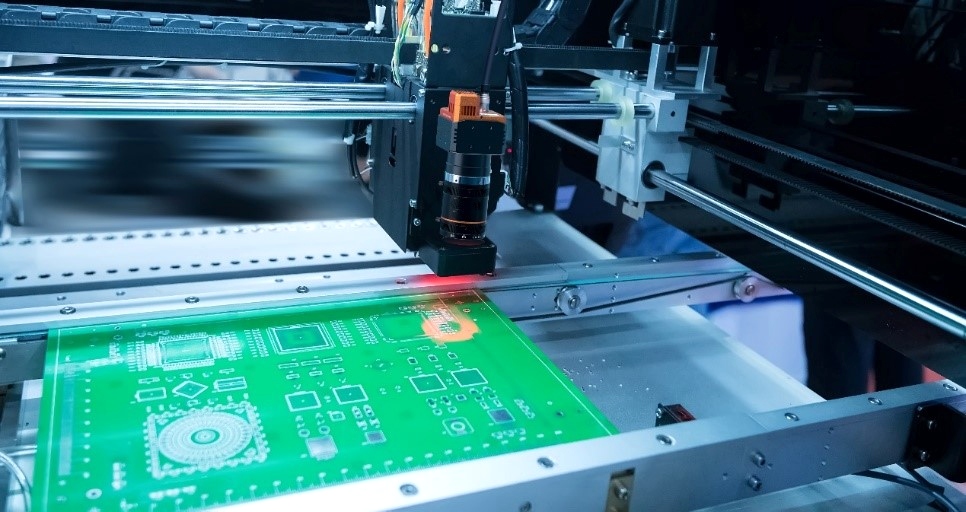
Nejprve je deska PCB fotografovaná horní kamerou a poskytují se souřadnice spojů, které je třeba změřit pro hrubé poziceování. Poté každý z manipulátorů přenesou snímec na odpovídající souřadnice, aby bylo možné provést přesné poziceování spoje a poté společně šťouchnout do spoje pro měření napětí a určení, zda je spoj v pořádku.
Bolestivá místa a problémy:
1.Použitím tradičního řešení jsou náklady na celou sadu kamery, čočky, zdroje světla, regulátor světla atd. vyšší.
2.Tradiční řešení má složitý proces, vysoké požadavky na lidi pro ladění na místě a vysoké pracovní náklady.
3.Tradiční řešení má delší dobu ladění a nemůže být rychle spuštěno.
2). Architektura řešení:
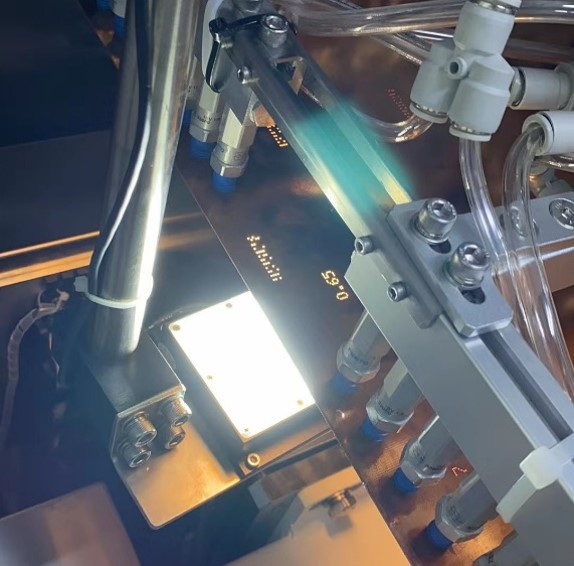
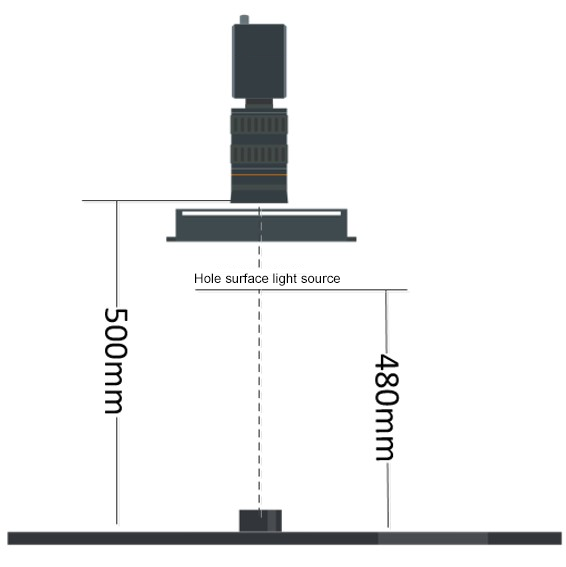
Nákres montáže:
Ladící proces:
1. Manipulátor nese kalibrační list a udržuje stejnou výšku s desku PCB. Snímá fotografie kamerou, vytváří proces pomocí VM, přijímá fyzické souřadnice manipulátoru prostřednictvím komunikačního protokolu TCP a provádí devítibodovou automatickou kalibraci.
2. Robotickej rameno nese inteligentní kameru pro fotografování kalibrační desky, provede bodování a generuje kalibrační soubory z obrazů a fyzických souřadnic devíti bodů.
3. Poloha desky PCB je odeslána robotickému ramenu, které nese chytrou kameru na odpovídající pozici pro fotografování spojovacích míst.
4. Chytrá kamera používá bodové vyhledávání k uspořádání jednotlivých položek spojovacích míst v pořadí, kalibruje souřadnice a převádí je pro dosažení třídění.
5. Po určení rozdílu mezi kalibračními fotografiemi chytré kamery a produkčními fotografiemi se přičte konverzní hodnota spojovacích míst pro získání skutečné polohy každého spojovacího místa.
3). Výhody programu:
1. Použijte horní kameru k fotografování souřadnic manipulátorů na obou stranách přímo, a po snímání prostřednictvím kalibrace a transformace dosáhnou oba manipulátory přímo na cílový bod, není třeba k němu docházet postupně, což významně ušetří čas pohybu manipulátorů. Celý proces se zkrátil z 15 sekund na přibližně 5 sekund.
2. Snížením hledacího obdélníkového rámečku pro spoje a individuálním pozicováním každého spoje lze dobře lokalizovat umístění spoje. Zákazníci vyžadují přesnost 0,1 mm, a současná přesnost dosahuje 0,05 mm, čímž jsou splněny požadavky zákazníků.
3. Tento projekt je typickým příkladem společného použití chytré kamery a průmyslové kamery. V reálném projektu lze podle skutečných potřeb vybrat vhodný typ kamery, dokonce i kombinaci obou, aby bylo možné se přizpůsobit zákaznickému prostředí a dosáhnout požadovaného efektu.
4. Původní plán zákazníka spočíval v odeslání souřadnic na odpovídající pozici horní kamery po snímání první fotografie a odeslání souřadnic pro druhou fotografii po jejím pořízení. Aktuální plán vyžaduje pouze jedno snímání a následné volání různých kalibračních souborů pro současné ovládání robota 1 a 2, čímž byla celková efektivita zvýšena o 20 %.