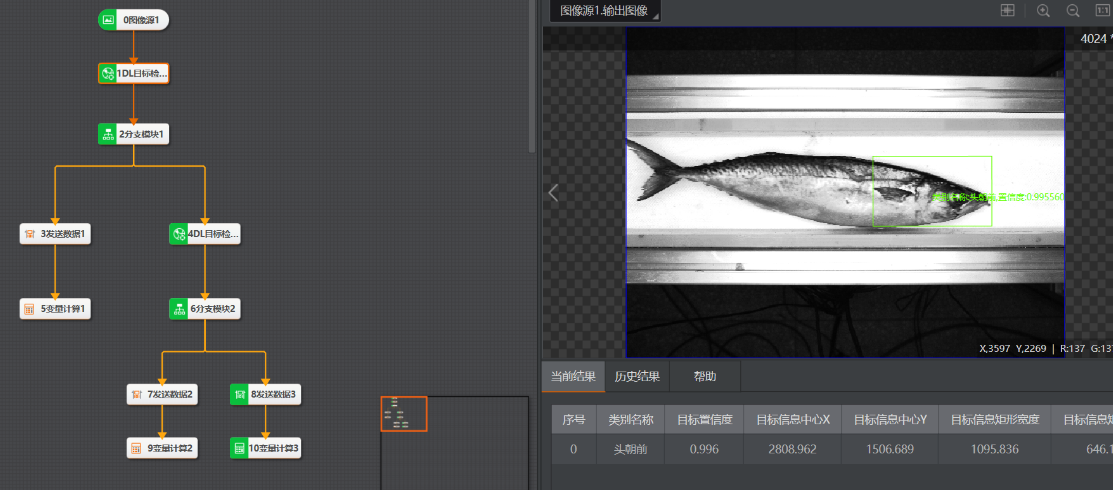
Pás nebude zastavovat, dynamické rozpoznávání směru hlavy a ocasu ryby, směru rybího záda.
Sdílet
i. Pozadí projektu:
Popis požadavků:
1. Pás neustává, dynamické rozpoznávání směru hlavy a ocasní části ryby, směru hřbetu ryby.
2. Klasifikace objektů a volba, zda je třeba je vyhodit.
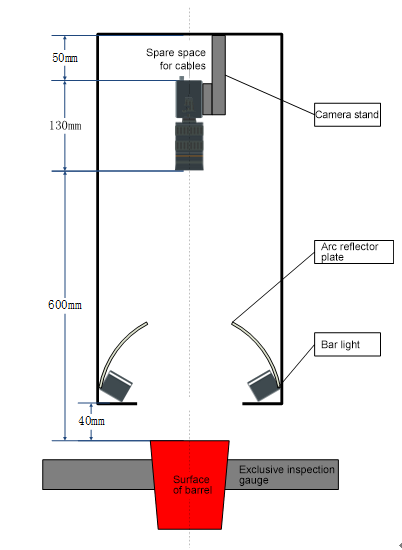
3. Pás + mechanismus fotoelektrického senzoru pro zpracování.
Náročnosti projektu a řešení:
Velké množství obrázků, hodně hlubokého trénování.
iI. Architektura řešení:
iII. Výhody programu:
1. Softwar a hardwar jsou prodávány spolu (VisionMaster + VisionTrain).
2. Během 1 měsíce po implementaci je VM rychle aplikován.
3. Přesnost výsledků je 97 % a úroveň spokojenosti zákazníků je vysoká.