úvodní stránka > Řešení > 3C Elektronika > Pozice čtyř kamer pro sekundární obrazovku telefonu
Pozice čtyř kamer pro sekundární obrazovku telefonu
Pomocí vývojové platformy algoritmu VM získejte středový bod sekundárního obrazového pole a prostřední rám telefonu a dokončete přizpůsobení.

1). Pozadí projektu:
Popis požadavků:
Pošlete středový bod vedlejší obrazovky a středního rámce do PLC, a na straně PLC se provede výpočet a řízení mechanismu pro korekci polohy vedlejší obrazovky podle polohy středního rámce, aby bylo dokončeno zarovnání vedlejší obrazovky se středním rámcem. Tím se vyřeší problém, že v původním plánu je nestabilní okraj extrahovaného rámu a středový bod vypočítaného rámu je posunutý, což může vést ke situaci, kdy není přesné zarovnání mezi ramenem vedlejší obrazovky a rámcem.
2). Architektura řešení:
Plán hlavně skládá z průmyslové kamery s rozlišením 12MP a vývojové platformy algoritmů VM.
Schéma je následující:
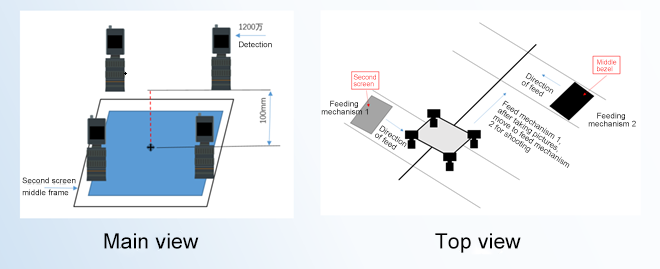
Popis funkce každé kamery:
Hlavní kamera: PLC odesílá instrukce pro kontrolu větve detekce rohu středního rámce nebo detekce rohu vedlejší obrazovky a výstup detekovaného rohu a signál dokončení detekce.
Sekundární kamera: Podobně jako u operace hlavní kamery, přidání mapování kamery a fyzikálního výpočtu.
3). Výhody programu:
1. vývojová platforma algoritmu VM umožňuje postavit schéma pomocí přetahovacího modulu, každý krok procesu je viditelný, usnadňuje inženýrům úpravu parametrů a ladění efektu.
2. pomáhá zákazníkům stabilně detekovat okraj prostředního rámce, aby byl střední bod vypočteného prostředního rámce stabilní, zvyšuje stabilitu zarovnání podobrazu prostředního rámce a výnos produktu.