Dans le processus de production des nouilles instantanées, la chaîne d'emballage insère automatiquement la cuillère, mais il y a une certaine probabilité qu'il y ait plusieurs cuillères ou des cuillères endommagées, ce qui affecte l'utilisation normale des nouilles instantanées.
Partager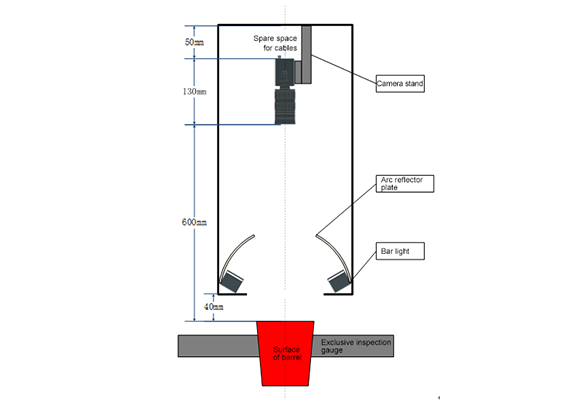
1). Contexte du projet :
Description du besoin :
Dans le processus de production des nouilles instantanées, la chaîne d'emballage dépose automatiquement la cuillère, mais il existe une certaine probabilité qu'il y ait plusieurs cuillères ou des cuillères endommagées, ce qui affecte ainsi l'utilisation normale des nouilles instantanées. Actuellement, chaque poste dispose de deux inspections manuelles, le coût du travail est élevé, et la stabilité de détection est mauvaise, avec un faible rendement. L'usine souhaite introduire la vision par ordinateur pour remplacer le travail humain et moderniser les lignes de production.
Exigences techniques :
Le rythme de production doit être supérieur à 6 paquets/s.
Le taux de détection manquée doit être inférieur à 0,01 %.
2). Architecture de la solution :
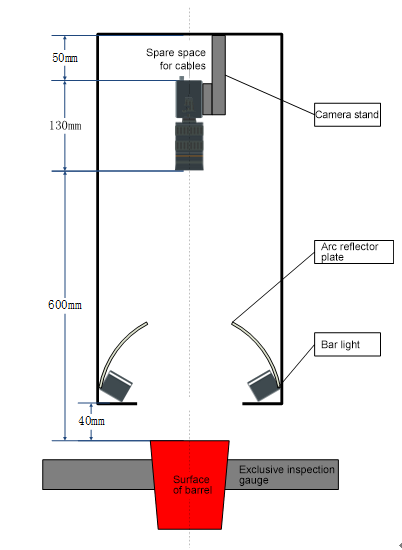
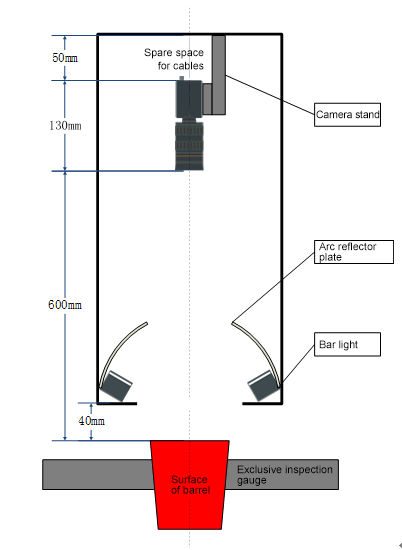
1. Schéma de mise en place :
2. Rendus d'imagerie :

3). Avantages du programme :
La posture de la fourchette est variée, la position est aléatoire, et elle peut être partiellement bloquée par le sachet de matériel dans une certaine mesure. La luminosité de l'image changera après une utilisation prolongée de la source lumineuse. Après l'introduction de solutions basées sur l'apprentissage profond, les performances globales ont été améliorées.
Se manifester dans :
1. Surmonter le problème selon lequel la couleur de la fourchette de nouilles instantanées est proche de celle du pain plat.
2. surmonter l'occlusion, la dégradation de la lumière et d'autres problèmes de transformation de la scène.
3. excellente précision de reconnaissance, le taux de fausses négatives est inférieur à 0,01 %.
4. efficacité de détection élevée, l'algorithme prend moins de 30 ms.