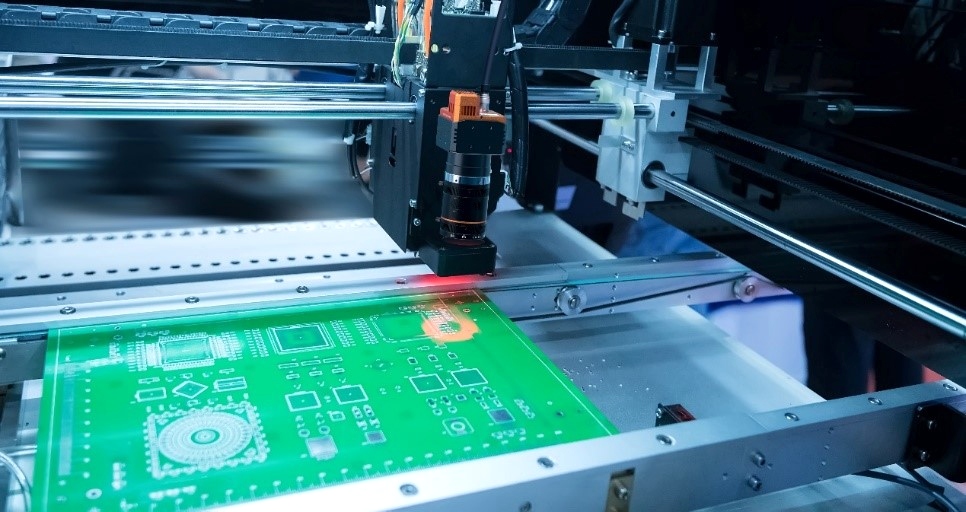
इस परियोजना के गुणवत्ता जाँच भाग में, दो सोन्ड्स का उपयोग करके सोल्डर जॉइंट्स के दोनों छोरों को छेदकर वोल्टेज को मापा जाता है, ताकि PCB बोर्ड पर सोल्डर जॉइंट्स का सही संपर्क हो या न हो यह निर्धारित किया जा सके और समस्याओं वाले उत्पादों को निकाला जा सके।
साझा करना
1). परियोजना पृष्ठभूमि:
आवश्यकता विवरण:
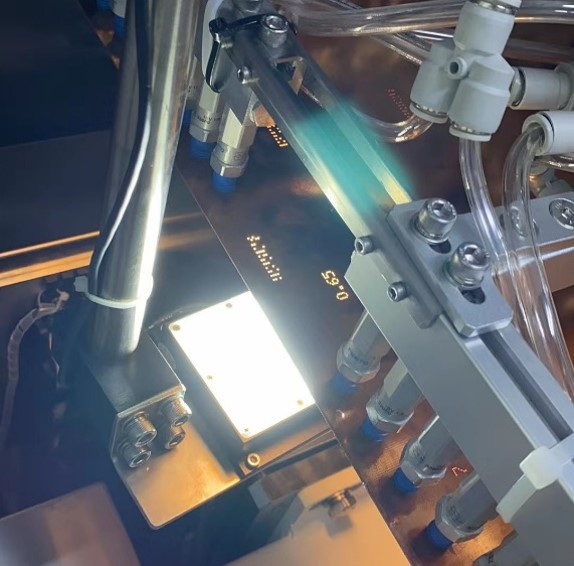
पहले, PCB बोर्ड को ऊपरी कैमरा द्वारा फोटोग्राफ़ किया जाता है, और मापने के लिए आवश्यक चांदी के संधानों के निर्देशांक दिए जाते हैं ताकि सर्वप्रथम स्थिति निर्धारित की जा सके। फिर दोनों मैनिपुलेटर क्रमशः एक संभागक को अपने संगत निर्देशांक पर ले जाते हैं ताकि चांदी के संधान को फोटोग्राफ़ किया जा सके, सटीक स्थिति निर्धारित की जा सके, और फिर एकसाथ चांदी के संधान को छूकर वोल्टेज मापा जाए और यह तय किया जाए कि क्या चांदी का संधान ठीक है।
दर्द के बिंदु और समस्याएं:
1. पारंपरिक योजना का उपयोग करते हुए, पूरे सेट के कैमरा, लेंस, प्रकाश स्रोत, प्रकाश स्रोत नियंत्रक और अन्य खर्च अधिक होते हैं।
2. पारंपरिक योजना में जटिल प्रक्रिया होती है, स्थान पर डिबगिंग करने वाले व्यक्तियों के लिए उच्च आवश्यकताएं होती हैं, और श्रम खर्च भी अधिक होता है।
3. पारंपरिक समाधान में डिबगिंग की अवधि लंबी होती है और तेजी से लॉन्च नहीं किया जा सकता है।
2). समाधान आर्किटेक्चर:
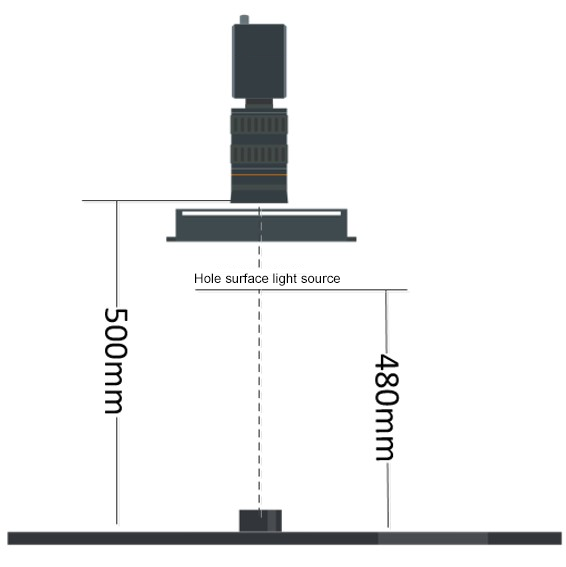
इरेक्शन डायग्राम:
डिबगिंग प्रक्रिया:
1. मैनिपुलेटर कैलिब्रेशन शीट को लेकर PCB बोर्ड के साथ एक ही ऊंचाई पर रखता है। कैमरे पर चित्र लें, VM के साथ प्रक्रिया बनाएँ, TCP संचार प्रोटोकॉल के माध्यम से मैनिपुलेटर के भौतिक निर्देशांक प्राप्त करें और नौ-बिंदु ऑटोमेटिक कैलिब्रेशन करें।
2. रोबोट आर्म एक स्मार्ट कैमरा लेकर कैलिब्रेशन बोर्ड के चित्र लेता है, स्टैम्पिंग करता है और नौ बिंदुओं के चित्रों और भौतिक निर्देशांकों से कैलिब्रेशन फाइलें बनाता है।
3. PCB बोर्ड की स्थिति रोबोट आर्म को भेजी जाती है, और रोबोट आर्म स्मार्ट कैमरा को अपनी सहायता से संबंधित स्थान पर ले जाता है और वहां ब्रेसिंग जोड़ का चित्र लेता है।
4. स्मार्ट कैमरा स्पॉट सर्च का उपयोग करके प्रत्येक ब्रेसिंग जोड़ की स्थिति को क्रमागत रूप से फ्रेम करता है, निर्देशांक कैलिब्रेट करता है और उन्हें परिवर्तित करके क्रमबद्ध करता है।
5. स्मार्ट कैमरा के कैलिब्रेशन चित्र स्थिति और उत्पादन चित्र स्थिति के बीच अंतर निकालने के बाद, ब्रेसिंग जोड़ की कैलिब्रेशन परिवर्तन मान को जोड़कर प्रत्येक ब्रेसिंग जोड़ की वास्तविक स्थिति प्राप्त करें।
3). प्रोग्राम के फायदे:
1. ऊपरी कैमरे का उपयोग दोनों पक्षों के मैनिपुलेटर्स के स्थानों के फोटो खिंचने के लिए किया जाता है, और फोटो खिंचने के बाद कैलिब्रेशन और रूपांतरण के माध्यम से दोनों मैनिपुलेटर्स लक्ष्य बिंदु तक पहुंच जाते हैं, और बारी-बारी से जाने की आवश्यकता नहीं होती है, जिससे मैनिपुलेटर के गति का समय बहुत अधिक बचता है। पूरे प्रक्रिया को 15 सेकंड से घटा कर लगभग 5 सेकंड तक कर दिया गया है।
2. खोज चांदी के जोड़े के आयताकार डब्बे को कम करके और प्रत्येक चांदी के जोड़े को व्यक्तिगत रूप से स्थिति देने से, चांदी के जोड़े के स्थान पर ठीक से स्थिति दी जा सकती है। ग्राहकों की आवश्यकता है 0.1mm की सटीकता के साथ, और वर्तमान सटीकता 0.05mm तक पहुंच गई है जो ग्राहकों की आवश्यकताओं को पूरा करती है।
3. यह परियोजना एक क्लासिक स्मार्ट कैमरा और औद्योगिक कैमरा का उपयोग करने वाली परियोजना है, वास्तविक परियोजना में उपयोगकर्ताओं की वास्तविक आवश्यकताओं के अनुसार उपयुक्त प्रकार के कैमरे का चयन किया जा सकता है, और यहांतक कि दोनों को मिलाकर ग्राहकों के पर्यावरण को अनुकूलित करने के लिए अनुरूप प्रभाव प्राप्त किया जा सकता है।
ग्राहक का मूल योजना पहले चित्र के बाद ऊपरी कैमरे की संगत स्थिति को निर्देशांक भेजने और दूसरे चित्र के बाद दूसरे चित्र के लिए निर्देशांक भेजने की थी। वर्तमान योजना में केवल एक बार चित्र लेना है और फिर अलग-अलग कैलिब्रेशन फ़ाइलों को बुलाकर रोबोट बाहु 1 और 2 को एक साथ नियंत्रित किया जाता है, और समग्र कार्यक्षमता में 20% की बढ़ोतरी हुई है।