Ebben a projekten a minőségi ellenőrzés részeként a feszültséget két szonda segítségével mérjük, amelyek keresztülmegyek a solder joints mindkét végén, hogy megállapítsuk, hogy a PCB tábla solder jointjei jól kapcsolódnak-e, és szűrjük ki a problémás termékeket.
Megosztás
1). Projekt háttére:
Kérvény leírása:
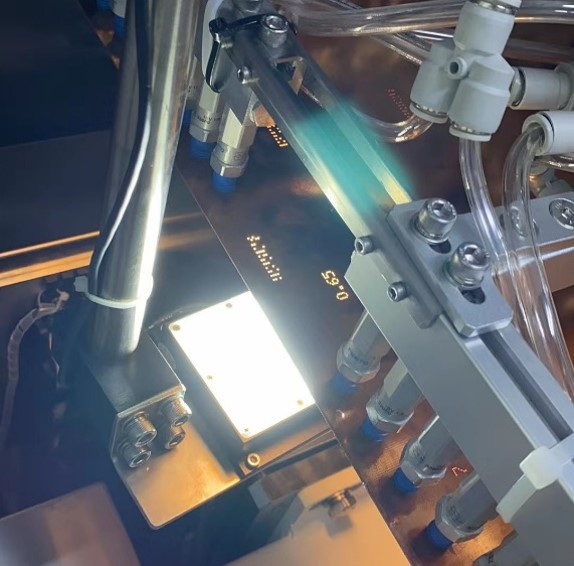
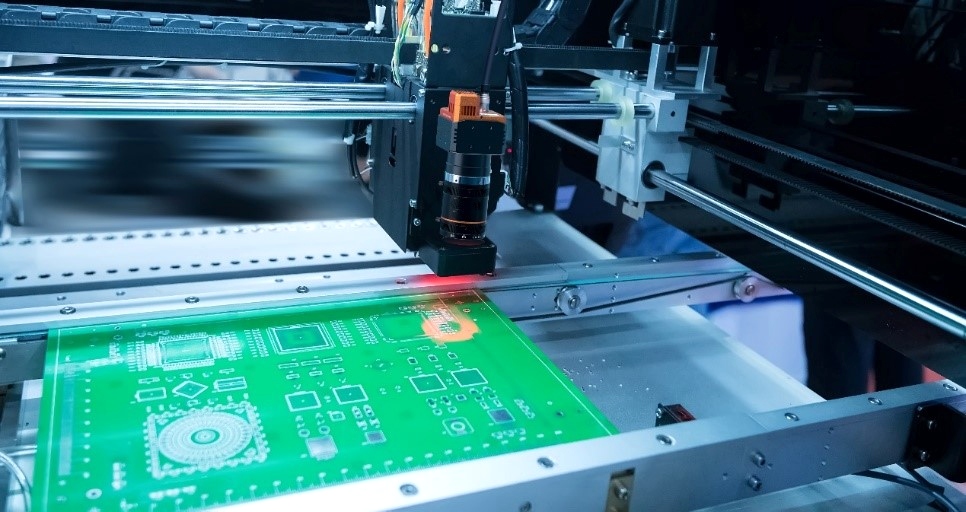
Először a felső kamera megfotózza a PCB-táblát, és a mérésre szükséges záróelemek koordinátái adottak közvetlen pozicionáláshoz. Ezután a két manipulátor egyikük egy érzékelőt visz el a megfelelő koordinátákhoz a záróelem fényképezéséhez, pontos pozicionálásához, majd együtt megtapogatják a záróelemt a feszültség méréséhez és annak meghatározásához, hogy a záróelem helyes-e.
Fájdalompontok és problémák:
1.Az összetett kamera, lencse, fényforrás, fényforrás-vezérlő stb. tradiós megoldás költsége magasabb.
2.A klasszikus megoldás bonyolult folyamatot igényel, magas követelményeket tűz fel az előhelyi hibajavítási személynek, és magas munkadíjjal jár.
3.A tradiós megoldás hosszú hibajavítási idővel jár, és nem indítható gyorsan.
2). Megoldási architektúra:
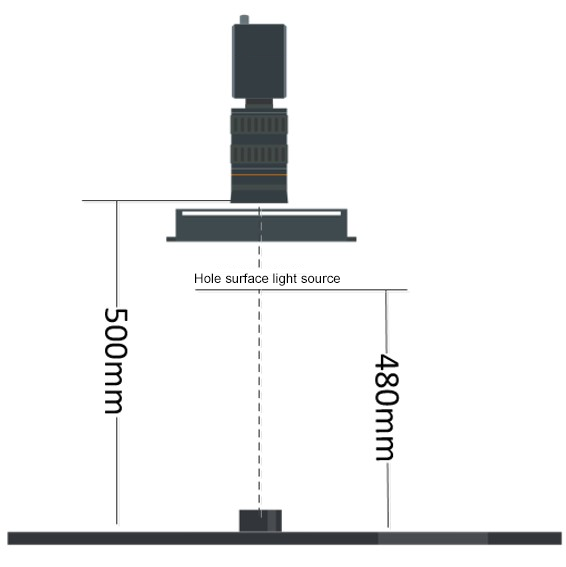
Állványrajz:
Hibajavítási folyamat:
1. A manipulátor hordja a kalibrációs lapot, és megtartja ugyanazt a magasságot a PCB táblával. Képeket vesz fel a kamerával, építi fel a folyamatot a VM-vel, fizikai koordinátákat kap a manipulátorról a TCP kommunikációs protokollon keresztül, és végzi a kilencpontos automatikus kalibrálást.
2. A robottöv csatlakoztat egy intelligens kamerát a kalibrációs tábla fényképének készítésére, elvégzi a ponthelyezést, és kalibráló fájlokat generál a kilenc pont képi és fizikai koordinátái alapján.
3. A PCB tábla helyzetét elküldik a robottövnek, és a robottöv hordozza az okos kamerát a megfelelő helyre a zármű fényképének készítéséhez.
4. Az okos kamera pontossági keresés metódust használ a zármű helyzetének sorrendben történő keretbe foglalására, kalibrálja a koordinátákat és konvertálja őket rendezés céljából.
5. Az okos kamera kalibrációs fényképének helyzetének és a termelési fényképének helyzetének különbségének kiszámítása után hozzáadja a zármű kalibrációs konverziós értékét annak meghatározására, hogy hol van minden egyes zármű valójában.
3). Program előnyei:
1. Használj egy felső kamerát a koordináták felvételéhez az egyik és másik oldali manipulátorokról közvetlenül, és a kétféle manipulátor eléri a célpontot közvetlenül a képfelvétel után kalibráció és transzformáció segítségével, és nem kell sorban hozzá menni, ami jelentősen csökkenti a manipulátorok mozgásának idejét. Az egész folyamat rövidítésével 15 másodperc helyett kb. 5 másodpercre csökkent.
2. A keresési solder joint téglalap alapú terület csökkentése és az egyes solder joint-ok individuális pozicionálása lehetővé teszi a jól meghatározott solder joint helyzetet. A vevők 0,1 mm pontosságot követelnek, és a jelenlegi pontosság 0,05 mm-re ér el, amely megfelel a vevői igényeknek.
3. ez a projekt egy klasszikus intelligens kamera és ipari kamera együttes használatáról szóló projekten, a valós projeckben megfelelő kamera típusa a valós igények szerint választható, vagy akár a két kamera együtt is alkalmazható a vevő környezetéhez igazítva, hogy elérje a megfelelő hatást.
4. A vevő eredeti tervje azt tartalmazta, hogy az első képet készítés után koordinátákat küldjön az felső kamera megfelelő pozíciójához, és második képet készítés után másik koordinátákat küldjön. Az aktuális terv csak egyetlen kép készítését igényli, majd különböző kalibrációs fájlokat hív meg az 1. és 2. robotkar egyszerre való irányításához, és az általános hatékonyság 20%-kal növekedett.