
Truk akan mengangkut palet yang penuh dengan material ke area unloading, dan setelah diunloading oleh forklift, material tersebut akan langsung dibawa ke stasiun manipulator 3D untuk pengurutan dan penguraian tumpukan. Setelah selesai, AGV akan digunakan untuk bekerja sama dalam transportasi ke stasiun kerja yang sesuai.
Bagikan
1) dan Latar belakang proyek:
Permintaan pelanggan:
Identifikasi dan uraikan ember dengan ukuran berbeda.
Titik kesulitan pelanggan:
1. Identifikasi kotak dengan ukuran berbeda yang tercampur, sesuai dengan posisi dan ukuran kotak untuk mengeluarkan arah pengambilan yang sesuai.
2. Pajanan berubah secara real time dari pagi hingga malam (cerah atau mendung), dan tingkat pengenalan produk serta stabilitas sistem perlu ditingkatkan.
2). Arsitektur solusi:
Proses keseluruhan:

Modul proses utama:
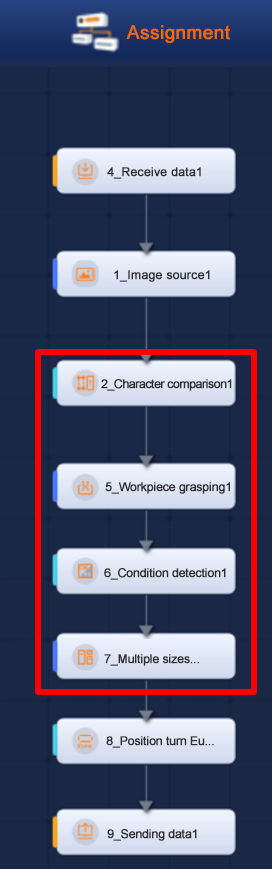
Perbandingan karakter: Tetapkan perintah pencocokan yang sesuai, yang digunakan untuk memicu secara logis deteksi modul berikutnya.
Pengambilan benda kerja: Gambar area dari gambar RGB di mana benda kerja akan diambil, dengan ruang lingkup pemilihan kotak melampaui tepi luar bingkai sebenarnya.
Deteksi kondisi: Tentukan apakah produk dikenali, dan kirim sinyal logika OK/NG yang sesuai ke komputer host.
Kotak multi-ukuran: konfigurasikan parameter terkait jenis palet kotak dalam berbagai ukuran dan jalankan tugas depaletisasi, gunakan contoh untuk mengsegmentasikan model algoritma, kumpulkan gambar dari berbagai posisi penempatan produk untuk pelatihan model.
2). Keunggulan program:
1. Dengan premis perubahan paparan besar, gambar dapat tetap jelas dan pengenalan stabil, serta waktu dari sinyal yang diterima hingga keluaran data adalah 3,5 detik.
2. untuk berbagai ukuran, warna kotak material mencapai tingkat pengenalan 100%.
3. untuk mencapai produksi tanpa henti 24/7, efisiensi kapasitas meningkat sebesar 100%.
4. stasiun manual mekanis 3D-RGBD dapat menggantikan 5 tenaga kerja.









