Konveyor tidak berhenti, identifikasi dinamis arah kepala dan ekor ikan, serta arah punggung ikan.
Bagikan
i. Latar belakang proyek:
Deskripsi persyaratan:
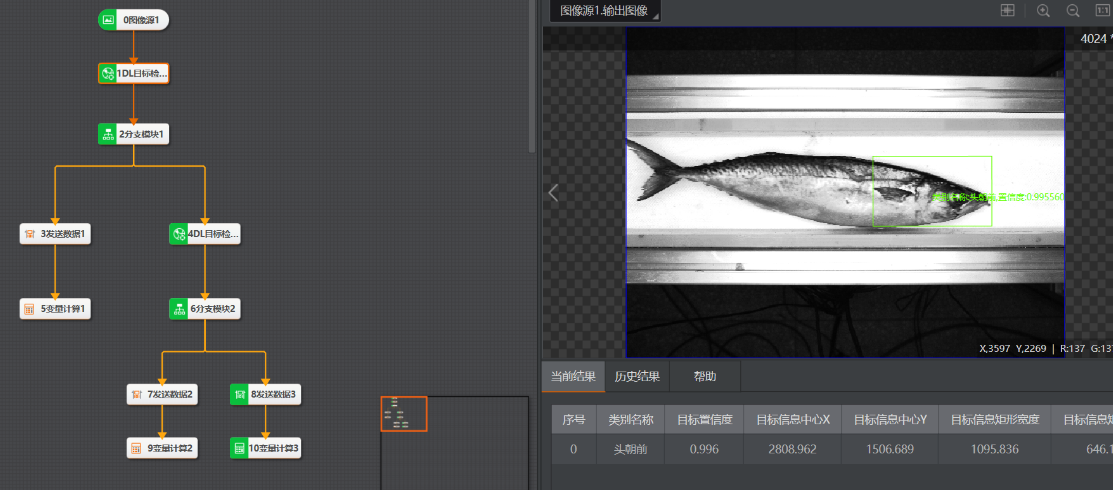
1. Sabuk konveyor tidak berhenti, identifikasi dinamis arah kepala dan ekor ikan, arah punggung ikan.
2. Mengklasifikasikan objek dan memilih apakah akan membuangnya atau tidak.
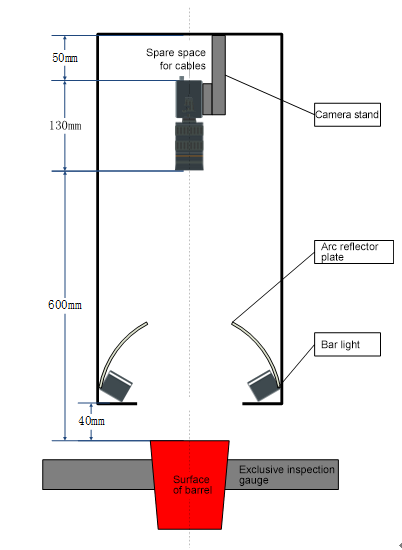
3. Sabuk konveyor + pemrosesan mekanisme sensor fotoelektrik.
Kesulitan proyek dan solusinya:
Jumlah gambar yang besar, banyak pelatihan mendalam.
iI. Arsitektur solusi:
iII. Keunggulan program:
1. Perangkat lunak dan perangkat keras dijual bersama-sama (VisionMaster + VisionTrain).
2. Setelah 1 bulan pelaksanaan, VM diterapkan dengan cepat.
3. Tingkat akurasi hasilnya adalah 97%, dan kepuasan pelanggan tinggi.