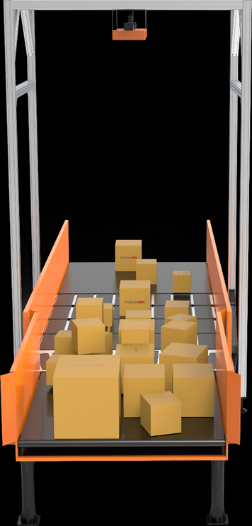
내장된 딥러닝 코어 RGB-D 스마트 스테레오 카메라는 로봇과 결합되어 있으며, 딥러닝 알고리즘과 전통적인 비전 알고리즘의 유기적 조합을 통해 로봇이 효율적으로 그립을 유지하도록 안내합니다.
공유
1). 프로젝트 배경:
요구 사항 설명:
1. 시각 및 벨트 제어를 수동 공급 대신 사용하세요.
2. 상자, 소프트 백, 뱀가죽 백, 봉투 등 다양한 종류의 패키지와 호환되어야 합니다.
3. 패키지 정위치, 분리, 스택 해제 기능을 달성해야 합니다.
4. 패키지가 쌓이거나 과도하게 저장되지 않도록 하여 개별적으로 통과시킵니다.
기술 요구사항:
1. 패키지 높이 범위: 10~500mm.
2. 실시간 처리 시간 ≤100ms.
3. 분리 성공률 > 99%.
4. 시스템 처리 효율 > 4000 개/시간.
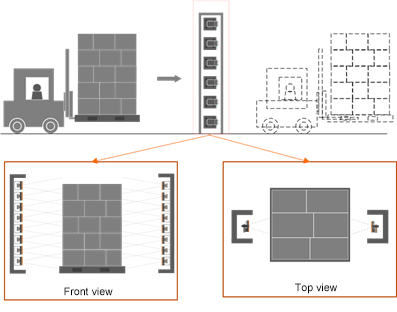
2). 솔루션 아키텍처:
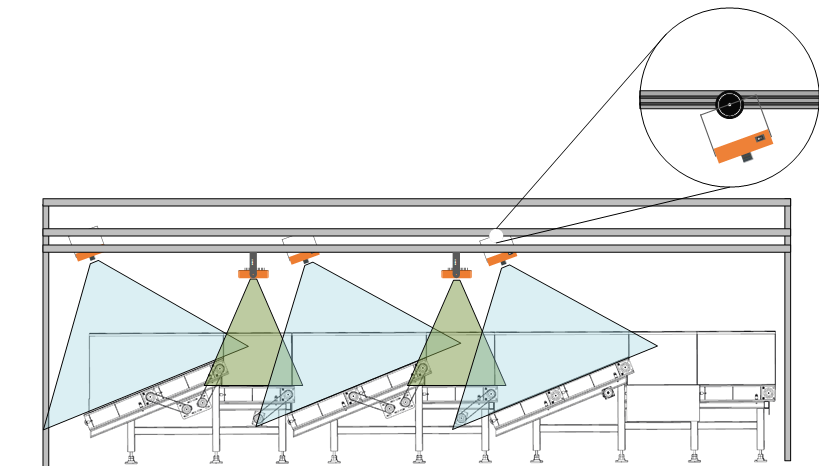
고비용, 패키지 쌓기 및 낮은 효율성 문제를 해결하기 위해 클라이밍 디스택킹 시스템은 컬러 산업용 카메라 + 고성능 호스트 솔루션과 선진 딥 러닝 알고리즘을 채택하여 다수의 패키지가 쌓인 다양한 복잡한 장면에서 정확한 패키지 위치 확인을 완료하고, 이후 벨트를 제어하여 패키지를 분리하는 명령을 실행합니다. 후단 스택 섹션은 싱글피스 분리, 이중 교정 및 다중 면 읽기와 매칭되어 자동 패키지 인식 및 정렬을 달성하며, 진정으로 인력을 줄이고 효율성을 증대시킵니다.
3). 프로그램의 장점:
1. 과학적인 스케줄링: 자체 개발된 지능형 제어 시스템으로 패키지 최적 제어 배열을 구성하여 쌓인 패키지의 효과적인 분리를 보장하고 후속 단계에서 잘못된 분리 압력을 줄입니다.
2. 인력을 줄이고 효율성을 높이십시오: 각 세트의 등반 및 스택킹 시스템은 2명의 노동자를 대체하며 최대 효율성은 시간당 약 2000개에 가까워지며 크로스벨트 전체 정렬 효율성 요구 사항을 충족합니다.
3. 안정적이고 신뢰할 수 있음: 딥러닝 알고리즘 기반으로 소프트백, 블랙백, 엔벨로프와 같은 복잡한 패키지를 두려워하지 않으며 정확한 위치를 제공합니다.
4. 강력한 확장성: 백엔드는 싱글피스 분리, EDP, 육면체 리딩 등의 자동화 장비에 접근할 수 있어 완전한 크로스테이프 자동 패키지 솔루션을 완성합니다.