1). 프로젝트 배경:
요구 사항 설명:
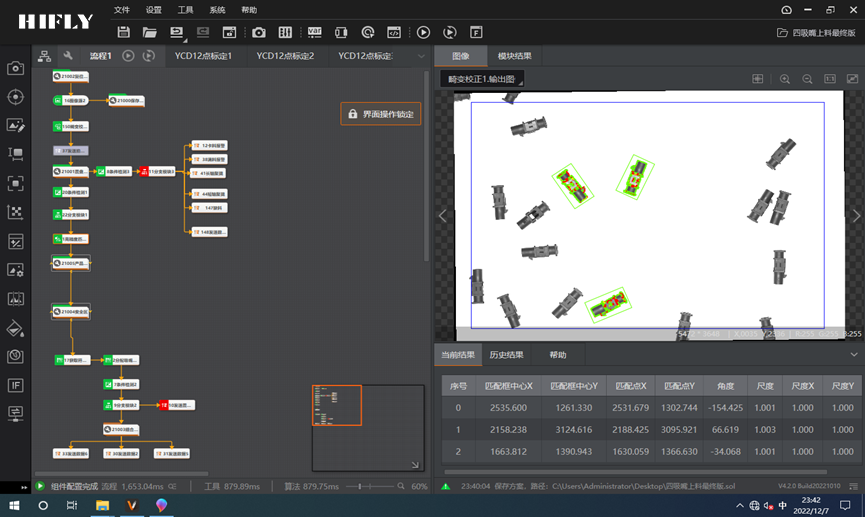
프로젝트는 VM 알고리즘 개발 플랫폼을 사용하여 다양한 재료의 로딩과 그Grabbing을 실현합니다. 재료는 진동 디스크를 통해 분산되며, 비전에 의해 요구 사항을 충족하는 재료가 먼저 필터링되고 이후 비전 위치 지정이 이루어집니다. 이 프로젝트의 어려움은 호환 가능한 특수 형상 부품의 360도 전체 각도 그립의 정확성을 최적화하는 방법입니다.
기술적 요구사항:
(1) 진동 디스크 제품 흡수를 달성하고 ±0.25mm의 위치 정확도를 확보
(2) 재료의 방향을 판단하고 좌우 방향을 구분
(3) 재료의 상하 방향을 필터링해야 하며, 정면이 위쪽이 아닌 경우 그립할 수 없음
(4) 안전 영역 기능은 진동 디스크 근처의 재료를 필터링해야 함
(5) 혼합물을 필터링해야 하며, 동일한 재료인 경우에도 그립할 수 없음
2). 솔루션 아키텍처:
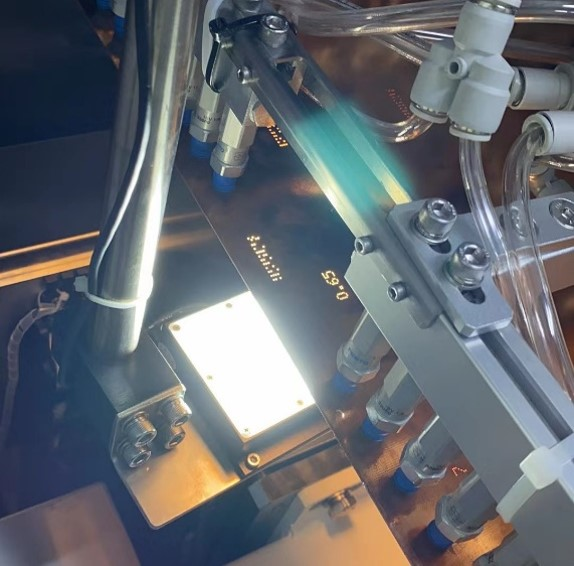
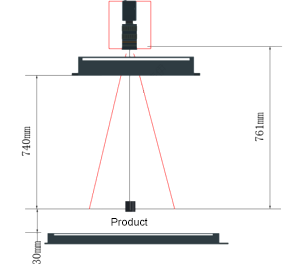
이 방식은 전면 빛과 후면 빛을 사용하여 재료의 윤곽을 인쇄하고 FA 렌즈를 매칭하여 긴 작업 거리와 큰 심도가 필요한 요구 사항을 충족합니다.
3). 프로그램의 장점:
1. 형상 부품의 자동 공급 기능을 실현하며, 누락된 그립률은 0.1% 미만입니다
2. VM 시각 이미지 알고리즘 처리 성능이 우수하고 고객 고속 조작기로 재료를 취할 수 있으며 시간당 7200개의 고속 공급 요구를 충족합니다
3. VM 알고리즘 플랫폼 표준 소프트웨어로 개발되어 복잡한 프로그래밍이 필요 없고 소프트웨어 엔지니어가 없어도 프로젝트 구축이 가능하여 기업의 개발 난이도와 사후 유지보수 비용을 줄입니다