
Lori akan membawa palet bahan penuh ke kawasan pelupusan, dan selepas dilupuskan dengan forklift, ia akan langsung dihantar ke stesen manipulator 3D untuk penyusunan dan pemisahan tumpukan. Selepas selesai, AGV akan digunakan untuk bekerjasama dalam pengangkutan ke stesen kerja yang sepadan.
Kongsikan
1). Latar belakang projek:
Permintaan pelanggan:
Kenal pasti dan bongkar tong berbeza saiz.
Titik kesakitan pelanggan:
1. pengenalan kotak berbeza saiz dicampur, mengikut kedudukan dan saiz kotak keluar arah tangkap yang sepadan.
2. Pendedahan berubah secara real time dari pagi ke petang (cerah atau mendung), dan kadar pengenalan produk serta keyakinan sistem perlu ditingkatkan.
2). Arkitektur penyelesaian:
Proses keseluruhan:

Modul proses utama:
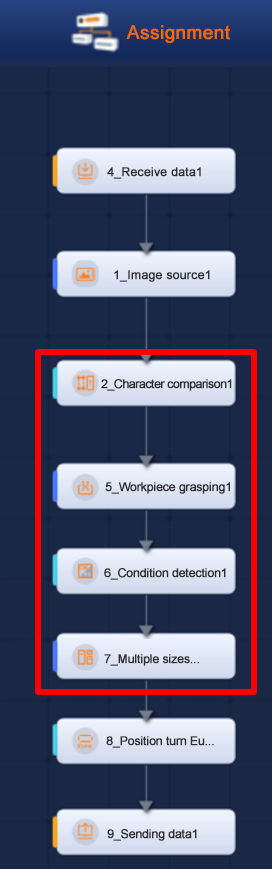
Perbandingan aksara: Tetapkan perintah padanan yang sepadan, yang digunakan untuk memicu logik pengesanan modul seterusnya.
Penjepitan bahan kerja: Lukis kawasan imej RGB di mana bahan kerja akan dijepit, dengan julat pemilihan kotak melampau pada tepi luar kerangka sebenar.
Pengesanan keadaan: Tentukan sama ada produk dikenal pasti, dan hantar isyarat logik OK/NG yang sepadan kepada komputer hos.
Kotak pelbagai saiz: konfigurasikan parameter berkaitan jenis palet kotak dalam pelbagai saiz dan jalankan tugas pembongkaran palet, guna contoh untuk menyegmentasikan model algoritma, kumpulkan gambar pelbagai kedudukan penempatan produk untuk latihan model.
2). Kelebihan program:
1. Dalam prinsip perubahan paparan besar, imej boleh jelas dan pengenalan stabil, masa dari isyarat diterima hingga data keluaran adalah 3.5 saat.
2. untuk pelbagai saiz, warna kotak bahan untuk mencapai kadar pengenalan 100%.
3. untuk mencapai pengeluaran tanpa henti 24/7, kecekapan kapasiti meningkat sebanyak 100%.
4. sebuah stesen manual mekanikal 3D-RGBD boleh menggantikan 5 tenaga kerja.









