Talian konveyor tidak berhenti, pengenalan dinamik arah kepala dan ekor ikan, arah belakang ikan.
Kongsikan
satu. Latar belakang projek:
Keterangan keperluan:
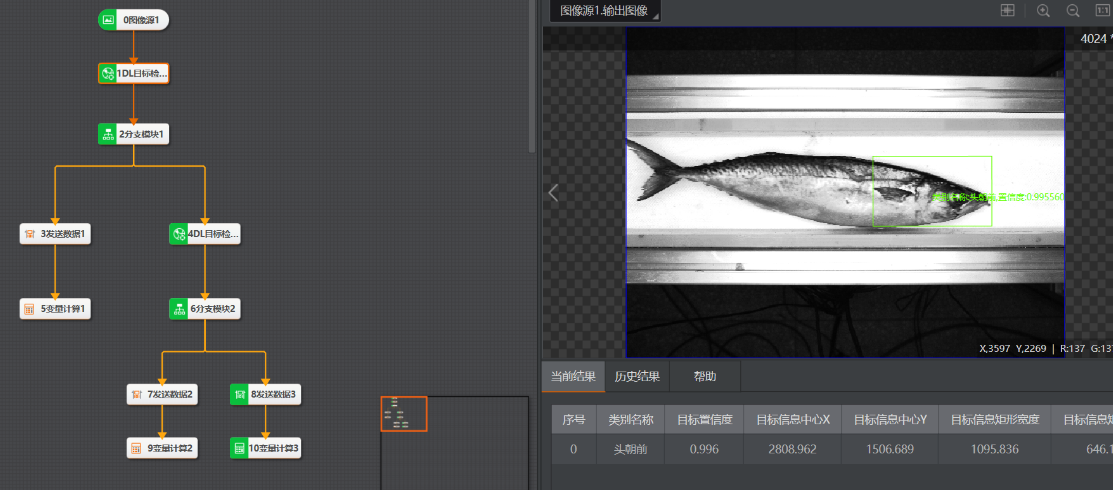
1. Pandu gelongsor tidak berhenti, pengenalan dinamik arah kepala ikan dan hujung ekornya, arah bahagian belakang ikan.
2. Mengklasifikasikan objek dan memilih sama ada untuk membuangnya.
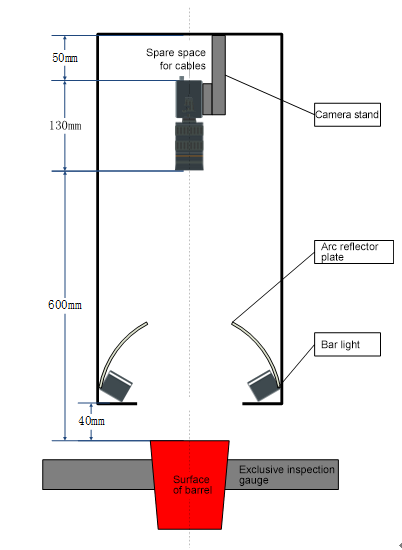
3. Pandu gelongsor + pemprosesan mekanisme sensor fotoelektrik.
Kebimbangan projek dan penyelesaiannya:
Bilangan imej yang besar, banyak latihan mendalam.
dua. Arkitektur penyelesaian:
tiga. Kelebihan program:
1. Perisian dan peranti keras dijual bersama-sama (VisionMaster + VisionTrain).
2. Selepas 1 bulan pelaksanaan, VM diterapkan dengan pantas.
3. Kejituan keputusan adalah 97%, dan kepuasan pelanggan adalah tinggi.