1). Projectachtergrond:
Vereisten beschrijving:
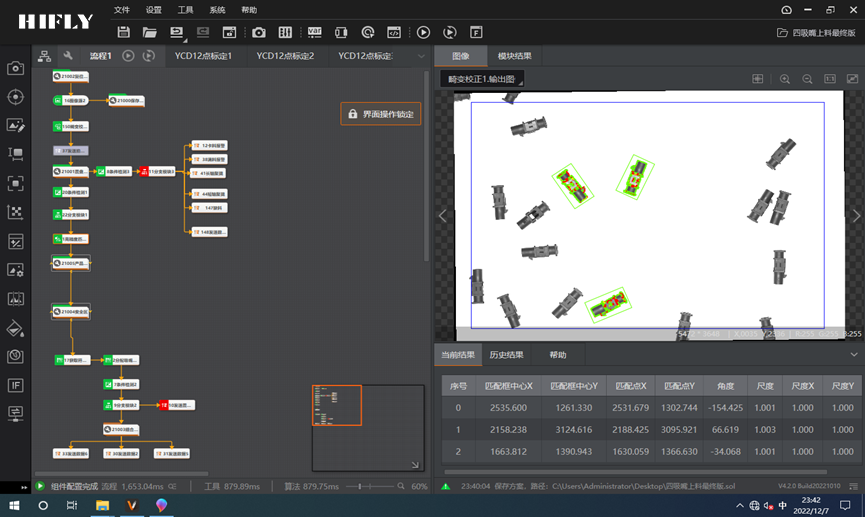
Het project gebruikt de VM algoritmeontwikkelingsplatform om het laden en pakken van verschillende materialen te realiseren. De materialen worden verspreid via een trillingschaal, en de materialen die aan de eisen voldoen, worden eerst visueel gescreend en daarna visueel gepositioneerd. De uitdaging van het project is hoe de nauwkeurigheid van een 360-gradige volledige hoekgreep voor compatibele speciale vormonderdelen kan worden geoptimaliseerd.
Technische vereisten:
(1) Trillingschaalproductabsorptie bereiken, positioneringsnauwkeurigheid van ±0,25mm
(2) Richting van het materiaal bepalen en links/rechts onderscheiden
(3) Het moet mogelijk zijn om het boven-en onderdeel van het materiaal te selecteren, niet alleen voor de juiste kant omhoog kan pakken
(4) De veiligheidszone-functie moet materialen dicht bij de trillingschaal schermen
(5) Moet in staat zijn om mengsels te schermen, niet alleen voor hetzelfde materiaal kan pakken
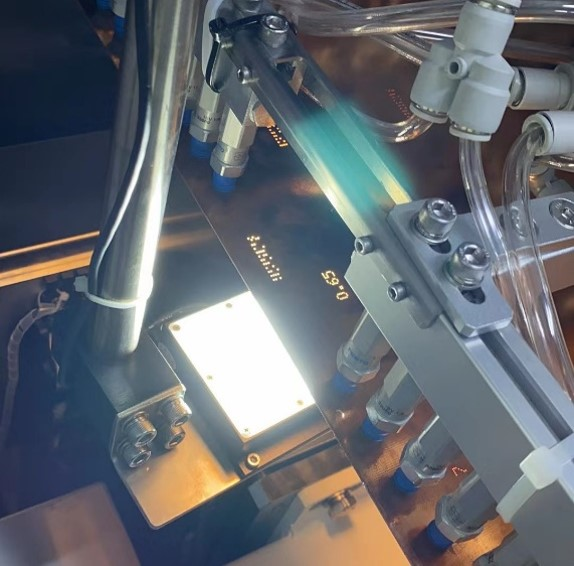
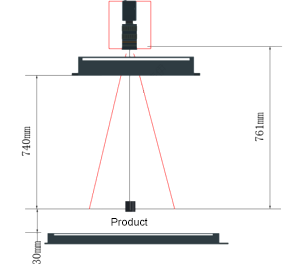
2). Oplossingsarchitectuur:
Het systeem gebruikt de voorkant lichtbron en de achterkant licht, drukt de materiaalcontour af, en combineert deze met de FA lens om de behoeften van een grote werkafstand en een grote diepte van veld te voldoen.
3). Programma-voordelen:
1. de automatische voedingsfunctie voor gevormde onderdelen wordt gerealiseerd, en de foutieve greepfrequentie is minder dan 0,1%
2. De VM-visuele algoritme verwerking heeft goede prestaties, samen met de hoge snelheid manipulator van de klant om materialen te pakken, kan dit de eis van hoge snelheid voeden van 7200 stuks/uur bereiken
3. VM algoritme platform standaard softwareontwikkeling, geen complexe programmering nodig, geen softwareingenieurs nodig om het project te voltooien, wat voor bedrijven de moeilijkheid van ontwikkeling en de kosten voor nasale onderhoud verlaagt