
Po wyładowaniu, AGV będzie współpracować z transportem do odpowiedniej stacji roboczej.
Udostępnij
1) tło projektu:
Popyt klientów:
Identyfikowanie i demontaż pojemników o różnej wielkości.
Punkty bolesne klienta:
1. różne rozmiary pudełka z mieszaną identyfikacją, w zależności od położenia i wielkości wyjścia pudełka odpowiadającego kierunku chwytania.
2. zmiany ekspozycji w czasie rzeczywistym od rana do wieczora (słoneczne lub pochmurne), a szybkość rozpoznawania produktu i stabilność systemu muszą zostać poprawione.
2) architektura rozwiązania:
Ogólny proces:

Kluczowe moduły procesów:
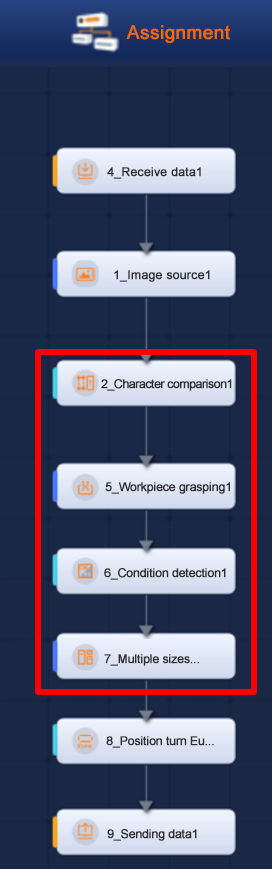
Porównanie znaków: ustawić odpowiednie polecenie dopasowania, które jest używane do logicznego uruchomienia kolejnej wykrycia modułu.
Chwytanie obrazu: narysowanie obszaru obrazu rgb, w którym ma być chwytany obrazek, przy czym zakres wyboru pola wykracza poza zewnętrzną krawędź rzeczywistego ramy.
Wykrywanie stanu: ustalenie, czy produkt jest rozpoznawalny, i przesłanie odpowiednich sygnałów logicznych ok/ng do komputera hosta.
Pudełko wielogromne: konfigurowanie odpowiednich parametrów typu pudełka paletyzującego różnych rozmiarów i wykonywanie zadania unpaletyzowania, wykorzystanie przykładu do segmentacji modelu algorytmu, zbieranie obrazów różnych pozycji umieszczenia produktu do szkolenia modelu.
2) zalety programu:
1. w warunkach dużych zmian ekspozycji obraz może być wyraźny i rozpoznawalność stabilna, a czas od sygnału odbieranego do danych wyjściowych wynosi 3,5 s.
2. dla różnych rozmiarów, kolory pudełka materiału w celu osiągnięcia 100% współczynnika rozpoznawania.
3. w celu osiągnięcia ciągłej produkcji 24/7, zwiększenie wydajności mocy produkcyjnych o 100%.
4. mechaniczna stacja ręczna 3D-RGBD może zastąpić 5 pracowników.









