Главная страница > Решения > Полупроводники/интегрированные схемы
В части контроля качества данного проекта напряжение измеряется с помощью двух щупов, которые прокалывают соответственно оба конца пайки, чтобы определить надежность контакта пайки на печатной плате и исключить бракованные изделия.
Поделиться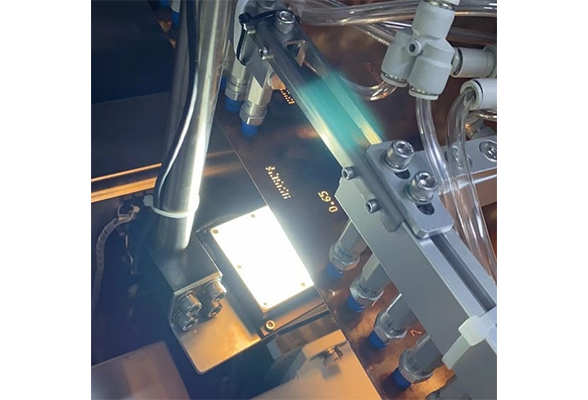
1). Контекст проекта:
Описание требования:
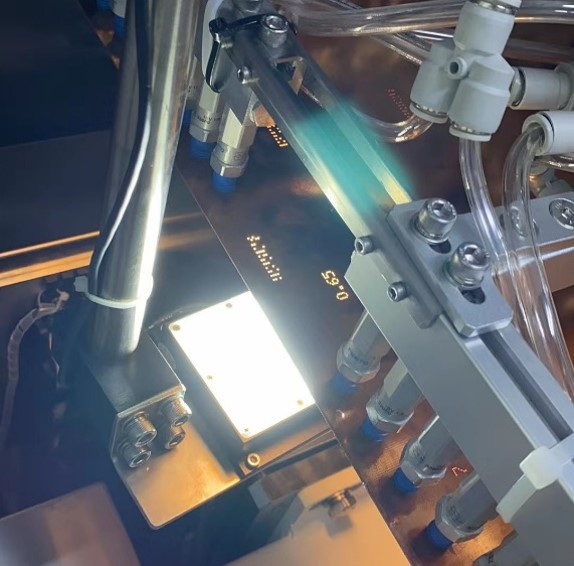
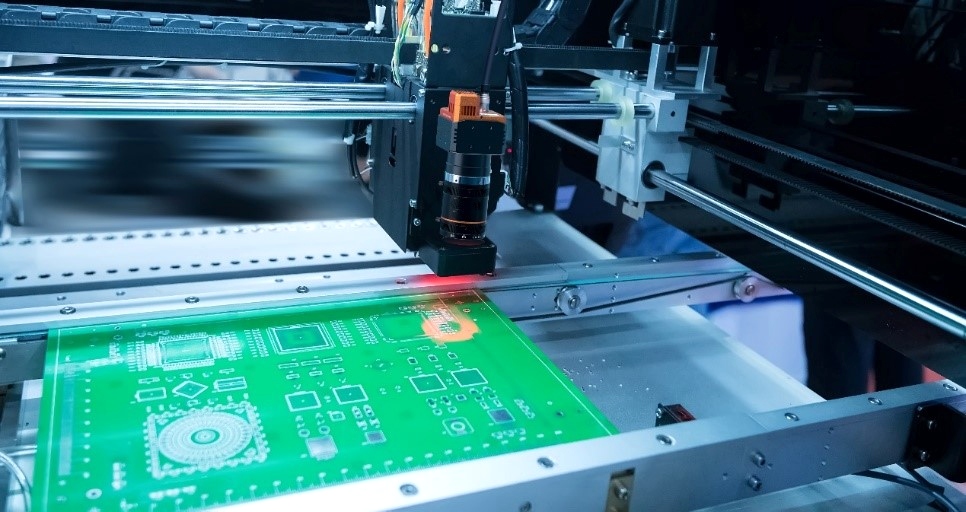
Сначала верхняя камера делает снимок печатной платы, и даются координаты пайковых соединений, которые необходимо измерить, для грубой настройки положения. Затем два манипулятора доставляют зонд к соответствующим координатам, чтобы сфотографировать пайковое соединение, выполнить точную настройку положения, а затем вместе ткнуть в пайковое соединение для измерения напряжения и определения его работоспособности.
Проблемы и болевые точки:
1. Использование традиционной схемы приводит к высоким затратам на всю систему, включая камеру, объектив, источник света, контроллер источника света и другие компоненты.
2. Традиционная схема имеет сложный процесс, высокие требования к персоналу, занимающемуся настройкой на месте, и высокую стоимость рабочей силы.
3. У традиционного решения длительный период настройки, и оно не может быть быстро запущено.
2). Архитектура решения:
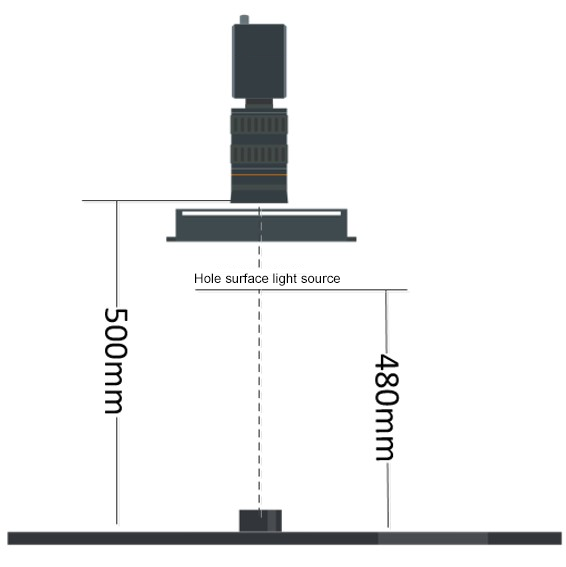
Схема установки:
Процесс настройки:
1. Манипулятор держит калибровочный лист и поддерживает ту же высоту с платой PCB. Делает фотографии на камеру, строит процесс с помощью VM, получает физические координаты манипулятора через протокол TCP-связи и выполняет девятиточечную автоматическую калибровку.
2. Роботизированная рука несет интеллектуальную камеру для съемки калибровочной панели, осуществляет маркировку точек и создает калибровочные файлы через изображения и физические координаты девяти точек.
3. Позиция платы PCB передается роботизированной руке, и роботизированная рука перемещает умную камеру в соответствующее положение для фотографирования паяного соединения.
4. Умная камера использует точечный поиск для поочередного определения каждого положения паяного соединения, калибрует координаты и преобразует их для достижения сортировки.
5. После выявления разницы между позицией калибровочного фото умной камеры и позицией производственного фото, добавляется значение преобразования калибровки паяного соединения для получения фактического положения каждого паяного соединения.
3). Преимущества программы:
1. Используйте верхнюю камеру для съемки координат манипуляторов с обеих сторон напрямую, и после съемки два манипулятора достигнут целевой точки через калибровку и преобразование, без необходимости посещать её по очереди, что значительно экономит время движения манипулятора. Весь процесс сократился с 15 секунд до примерно 5 секунд.
2. Сокращая прямоугольную область поиска пайки и позиционируя каждое место пайки отдельно, можно точно определить местоположение места пайки. Клиенты требуют точности 0,1 мм, а текущая точность составляет 0,05 мм, что удовлетворяет потребности клиентов.
3. Этот проект является классическим примером совместного использования умной камеры и промышленной камеры. В реальных проектах можно выбирать подходящий тип камеры в зависимости от реальных потребностей, а также использовать их вместе для адаптации к условиям клиента и достижения соответствующего эффекта.
4. Изначальный план клиента заключался в отправке координат на соответствующую позицию верхней камеры после первого снимка и отправке координат для второго снимка после второго кадра. В текущем плане требуется сделать только один снимок и вызвать различные файлы калибровки, чтобы одновременно управлять роботизированными руками 1 и 2, при этом общая эффективность увеличилась на 20%.