
Tovornjak bo prepeljal palete polne materialov na območje raztovarjanja, po raztovarjanju pa jih bo po raztovarjanju s viličarskim tovornjakom neposredno prepeljal na postajo 3D manipulatorja za razvrščanje in razstavljanje. Po dokončanju bo AGV uporabljen za sodelovanje pri prevozu na ustrezno delovno postajo.
Delitev
1). Pozadina projekta:
Zahteva stranke:
Razpoznava in razmontiranje vesečev različnih velikosti.
Boleče točke strank:
1. mešana identifikacija poštovnih kutij različnih velikosti, izhodna smer hvapanja določena glede na položaj in velikost kutije.
2. Osvetljenje se spreminja v realnem času od jutra do večera (sončno ali oblačno), in je potrebno izboljšati zaznavnost produkta ter stabilnost sistema.
2). Arhitektura rešitve:
Skupen postopek:

Ključni procesni moduli:
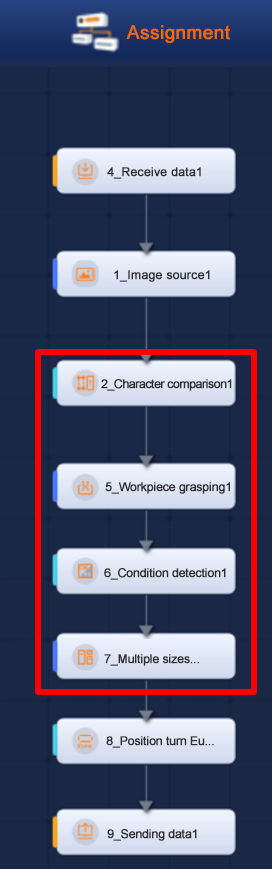
Primerjavo znakov: Nastavite odgovarjočo ujemanje ukaza, ki se uporablja za logično izpeljavo nadaljnje zaznavanja modula.
Hranjenje delovnih kosov: Narišite območje RGB slike, kjer je delovni kos da hranjen, z območjem izbire okvirja, ki se raztega za rob dejanskega okvirja.
Zaznavanje pogojev: Določite, ali je izdelek prepoznan, in pošljite odgovarjajoče logične signale OK/NG glavnemu računalniku.
Večkratna velikost okvirja: konfigurirajte relevantne parametre vrste paletizacije v več kraticah in izvedite nalogo de-paletizacije, uporabite primer za segmentacijo algoritma modela, zbirate slike različnih položajev postavitve izdelka za učenje modela.
2). Prednosti programa:
1. Pri predpostavki velikih sprememb osvetlitve je možno, da je slika jasna in je prepoznavanje stabilno, čas od prejetega signala do izhodnih podatkov je 3,5s.
2. za različne velikosti, barve materialnih okvirjev dosežejo 100% stopnjo prepoznavanja.
3. doseži neprekinjeno delovanje 24/7, zmogljivost povečana za 100 %.
4. postaja ročna mehanska postaja s 3D-RGBD lahko zamenja 5 delavcev.









