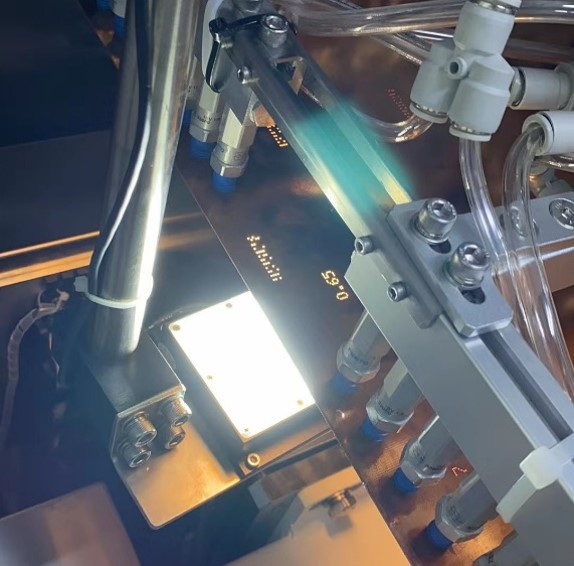
V delu kakovostne preverjanja tega projekta merimo napetost z uporabo dveh vtičnic, ki odkrijeta obeh strani lepljenih povezav, da se določi, ali so povezave na PGP plošči dobro stikovane in izločijo problematične produkte.
Delitev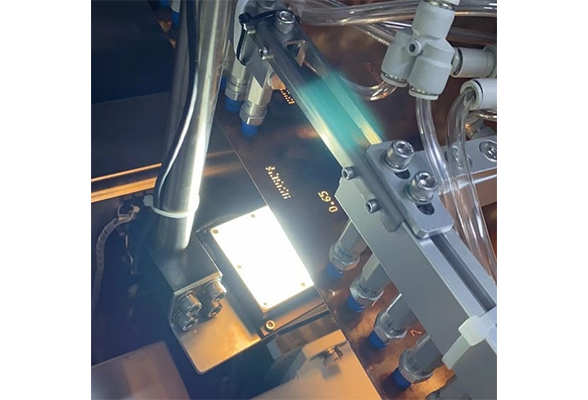
1). Pozadina projekta:
Opis zahtevanja:
Najprej fotografira gornja kamera PCB ploščo in poda koordinate lotov, ki jih je potrebno meriti, za približno pozicioniranje. Nato posamezna manipulatorja prinese sonde na ustreznega koordinatnega položaja, da zafotografirata lot, izvedeta natančno pozicioniranje in nato skupaj pognosta v lot, da merita napetost in določita, ali je lot dober.
Bolišča in težave:
1. S tradicionalnim postopkom so stroški celotnega nabora, vključno s kamerami, leči, svetilnimi viri, regulatorji svetlobe itd., višji.
2. Tradicionalni postopek je zapleten, zahteva visoke kvalifikacije osebja za lokacijsko nalaganje in ima visoke stroške dela.
3. Tradicionalna rešitev ima dolgo obdobje nalaganja in ni mogoče jo hitro zagnati.
2). Arhitektura rešitve:
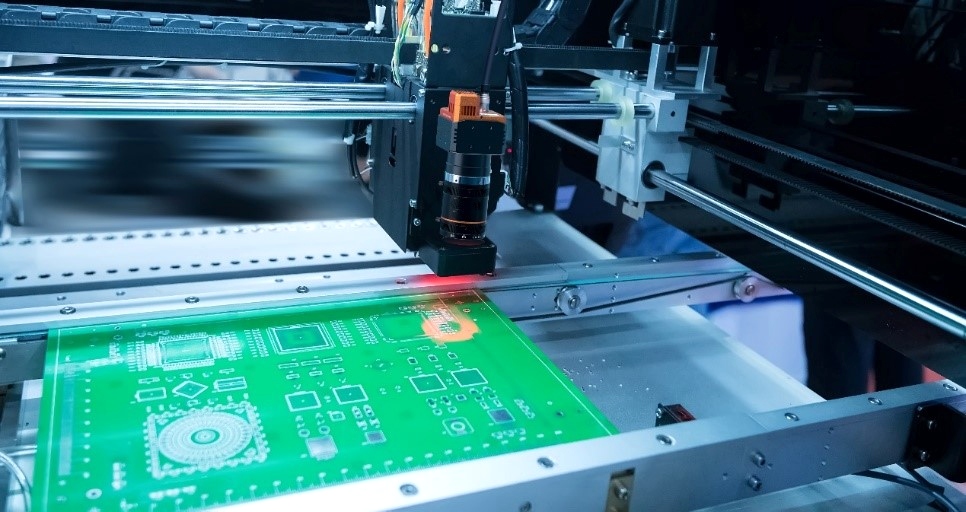
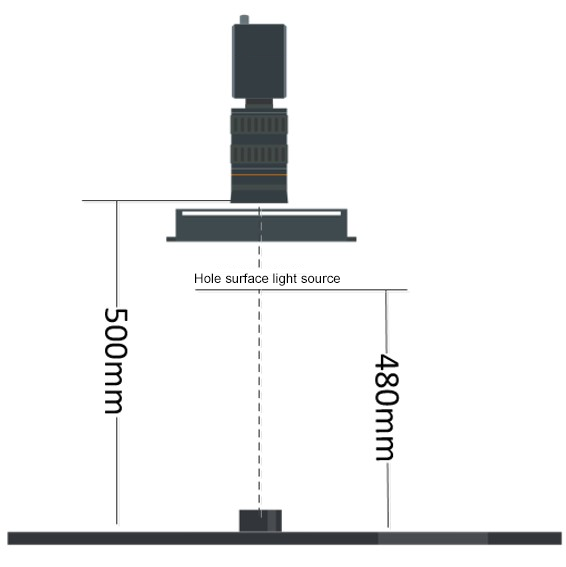
Slikovna shema:
Postopek nalaganja:
1. Manipulator nosi kalibracijsko listino in ohranja isto višino kot plošča PCB. Poišče slike na kameri, zgradi postopek z VM, prejme fizikalne koordinate manipulatorja skozi TCP komunikacijski protokol in izvede avtomatsko devetotočkovno kalibracijo.
2. Robota nosi inteligentno kamerico za fotografiranje kalibracijske plošče, izvaja točkovno pečo in ustvari kalibracijske datoteke skozi slike in fizikalne koordinate devetih točk.
3. Položaj plošče PCB je poslan robovski raki, ki nese pametno kamerico do odgovarjajočega položaja za fotografiranje solderjenih povezav.
4. Pametna kamera uporablja iskanje po točkah, da uredi vsako položaj solderjenih povezav, kalibriše koordinate in jih pretvori za dosego razvrstitve.
5. Po določitvi razlike med položajem kalibracijske slike pametne kamere in položajem proizvodne slike, dodaj vrednost konverzije kalibracije solderjenih povezav, da pridobite dejanski položaj vsake solderjene povezave.
3). Prednosti programa:
1. Uporabite zgornjo kamerico za snemanje slike koordinat manipulatorjev na obeh straneh, pri čemer se obema manipulatorjema po snemanju slike preko kalibracije in transformacije neposredno doseže ciljni točk, brez potrebe, da bi se tam dostopalo po vrsti, kar zelo veliko pomanjša čas premikanja manipulatorjev. Celoten postopek je skrajšan iz 15 sekund na okoli 5 sekund.
2. Z manjšanjem pravokotnega okvirja za iskanje solderjenih povezav in posameznim določanjem vsake solderjene povezave je mogoče dobro določiti lokacijo solderjenih povezav. Stranki zahtevajo natančnost 0,1 mm, trenutna natančnost pa dosega 0,05 mm, kar izpolnjuje potrebe strank.
3. ta projekt je primer klasične uporabe pametne kamere in industrijske kamere, v resničnem projektu lahko glede na dejanske potrebe izberete primerno vrsto kamere, celo obeh skupaj, da prilagodite okolje stranke in dosežete želeni učinek.
4. Izvirni načrt stranke je bil, da po prvi sliki pošlje koordinate na odgovorno mesto zgornje kamere in po drugi sliki pošlje koordinate za drugo sliko. Trenutni načrt pa zahteva le enkratno zajemanje slike in klic različnih kalibracijskih datotek, da istočasno nadzira robota 1 in 2, pri čemer se skupna učinkovitost poveča za 20 %.