zaslon je ključni proces proizvodnje baterije, vizualno postavitev položaja tiskanja za vodenje tiskanja UVW platforme in ponovno preverjanje napak po tiskanju.
Delitev
1) Področje projekta:
opis zahtev:
zahteve glede položaja: posnetek štirih vogalov ali označevanje točk silicijeve plošče, določitev položaja tiskanja in vodenje tiskanja na UVW platformi;
zahteve za odkrivanje:
1. odkrivanje poškodb robov baterije;
2. odkrivanje umazanije na bateriji, kot so pepel, prstni odtisi itd.;
3.preverite, ali je natisnjena baterija razpokan ali pokvarjen.
tehnične zahteve:
statična natančnost je približno ± 0,005 mm, dinamična natančnost pa približno ± 0,015 mm.
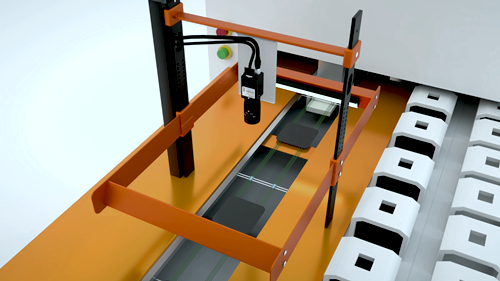
2) arhitektura rešitev:
sistem za pozicioniranje se sestavlja iz industrijske kamere z ločljivostjo 5 mp, industrijske leče serije HF in prstanskega svetlobnega vira.
2k industrijska kamera za skeniranje linije, kf leča in linijski svetlobni vir sestavljajo nadzorni sistem za videnje.
3) prednosti programa:
1.visoka natančnost, s črno-belo kalibracijo šahovske tablice, korekcijo radialnega in perspektivnega izkrivljanja.
2. nizka poraba, čas procesa določanja položaja ≤ 150 ms, čas procesa za odkrivanje robov ≤ 200 ms.
3. temelji na vm platformi, z bogato visoko zmogljivostjo algoritmov modulov, algoritem za pozicioniranje na podlagi značilnosti ujemanje, algoritem za odkrivanje robov napake na podlagi linearnih orodij za odkrivanje napak.
4. stroškovno učinkovita rešitev za kamere, nizke stroške, visoke zmogljivosti.