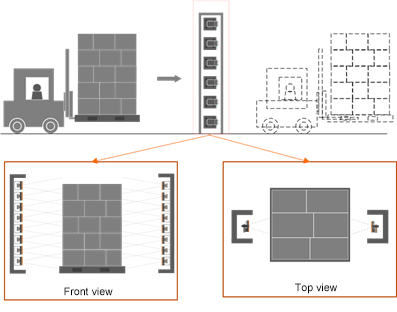
Den inbyggda djup inlärningskärnan RGB-D intelligent stereokamera är kopplad till roboten, och genom den organiska kombinationen av djup inlärningsalgoritm och traditionell synalgoritm, styrs roboten att greppa effektivt hela tiden.
Dela
1) Projektets bakgrund:
Kravsbeskrivning:
1. använda visuell styrning och bältesstyrning i stället för manuell ström.
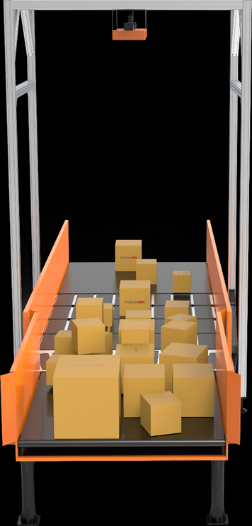
2. måste vara kompatibel med kartong, mjuk väska, snakepaddsväska, kuvert och andra typer av förpackningar.
3. måste uppnå paketpositionering, separation, avstapling funktioner.
4. se till att paket inte staplas eller överlagras och passerar separat.
Tekniska krav:
förpackningshöjd: 10 - 500 mm.
2. realtidsbehandlingstid ≤ 100 ms.
3. framgångsgrad för separation > 99%.
4. Systembehandlings effektivitet > 4000 bitar/timme.
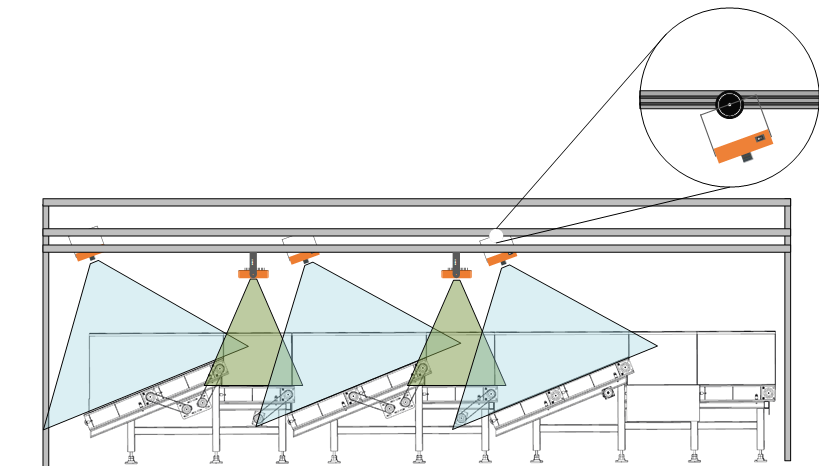
2) lösningsarkitektur:
Syftar till problemen med höga kostnader, paketstapling och låg effektivitet, tar klättrande avstaplingssystemet färgindustriell kamera + högpresterande värdlösning och avancerad djup inlärningsalgoritm för att slutföra exakt paketpositionering för ett stort antal staplade paket och ett brett utbud av komple
3) Programets fördelar:
1. vetenskaplig planering: självutvecklat intelligent styrsystem, paketets optimala styrordning, för att säkerställa effektiv separation av staplade paket, minska baksidan av fel separationstryck.
2. minska personal och öka effektiviteten: varje uppsättning klättrings- och staplingssystem ersätter 2 arbetskraft, den maximala effektiviteten är nära 2000 stycken/timme, för att uppfylla kravet på full sorteringseffektivitet på tvärbältet.
3. stabil och tillförlitlig: baserad på en algoritm för djup inlärning, är den inte rädd för komplexa paket som mjuka väskor, svarta väskor och kuvert och ger exakt positionering.
4. stark expansion: back-end kan komma åt enstaka separation, edp, sexsidig läsning och annan automatiseringsutrustning för att slutföra en komplett uppsättning av automatiska paketlösningar med tvärband.