projektkrav
Den övre kameran fotograferar tunn film och den nedre kameran fotograferar magnetisk plåt och gör sedan justering och bindning.
2 kärnteknik
En mekanisk arm utför justering och bindning.
projektets svårigheter
När filmen är färdig måste den roteras med 90° innan den binder. Den konventionella bindningsmetoden är instabil och har ett stort fel vid den faktiska provningen.
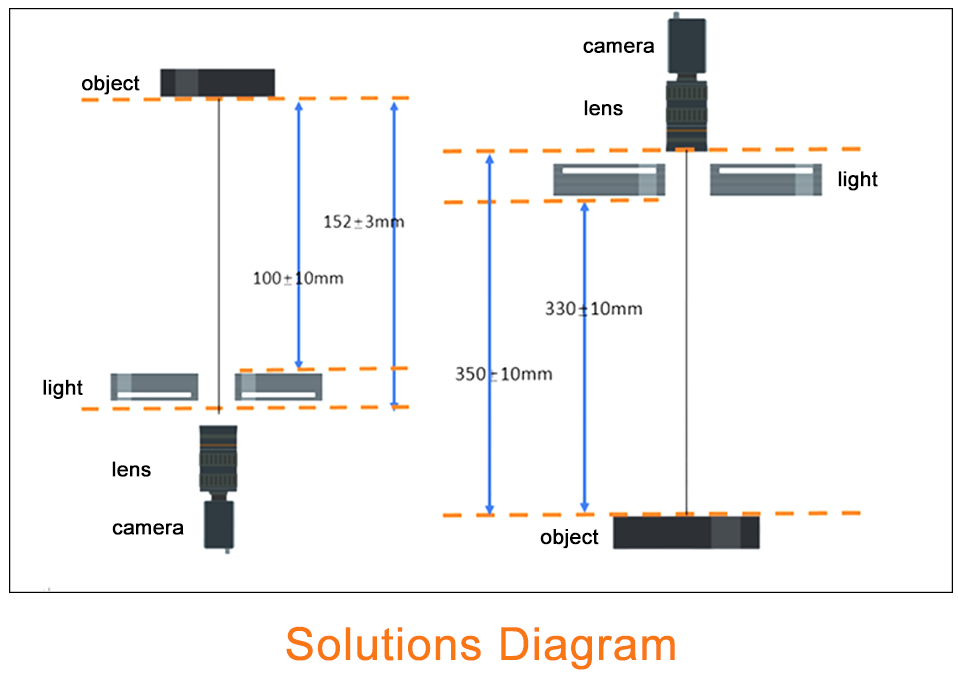
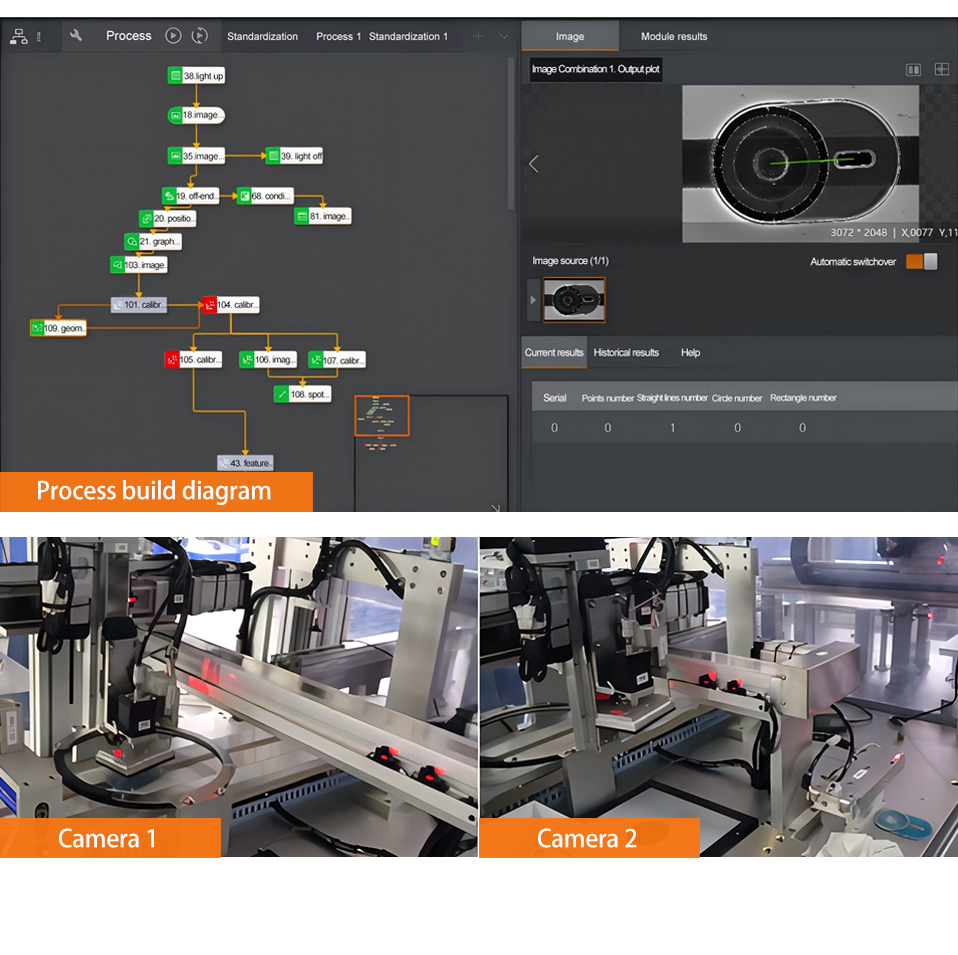
4projektlösning
Hitta cirkelns centrum och fyrhörningens centrum på kameran, med det avlägsna centret som passande punkt, och vinkeln mellan cirkelns centrum och fyrhörningens centrum som passande vinkel. Hitta fyrhörningens centrum och cirkelcentrum på kamerafilmen, med cirkelcentrum som passande punkt och linjen som förbinder cirkelcentrum och fyrhörningens centrum som passande vinkel.
Beräkna den virtuella punktpositionen efter att ha roterat cirkelns centrum med 90 grader, och använd sedan denna punktposition för enpunktsjustering.
5projektets resultat och värden
Genom att tillhandahålla kunderna stödjande utrustning för maskinvara och programvara är den övergripande lösningen snabb att bygga och mycket praktisk.
projektkrav
• Kontrollera att 10 pennkärnor på en gång har svart bläck och genomskinlig bläckstorlek.
• utföra syndebuggar och utrustningsaccept.
• skräddarsydd gränssnittsproduktion.
2 kärnteknik
Kombinationsanvändning av multiprodukttillståndsdetektering och logikmoduler.

projektets svårigheter
• de olika typerna av penna är inkonsekventa och det finns skillnader i bildbehandling.
• felaktig avståndsdetektion.
4projektlösning
• minska skillnaden efter att bilden har blivit binär.
• identifiera start- och slutpunkterna separat och mäta dem sedan med prickar.
5projektets resultat och värden
• tillhandahålla kunder med programvara och hårdvara som stöd för utrustning, är den totala lösningsbyggnadshastigheten snabb.
• kunderna kan själva redigera och utforma gränssnittet, med låg sannolikhet för falska positiva och falska negativa, och uppfylla kraven för kvalitetskontroll.


|
Analysera krav |
|
|
Identifiera projektkrav |
Exempel på dessa metoder är att upptäcka fel, mäta dimensioner, känna igen tecken etc. |
|
Miljöförhållanden |
Belysning, bakgrundskomplexitet, typ och egenskaper hos målobjektet osv. |
|
Systematisk utformning |
|
|
Hardwarelösning |
Kamera, objektiv, ljus och processor, ect. |
|
Programvarudesign |
Välj eller utveckla lämpliga algoritmer för bildbehandling och programvaruplattformar |
|
Systematisk integration |
|
|
Integrering av maskinvara |
Installera kameran, linsen och ljuset på plats |
|
Integrering av mjukvara |
Bilder bearbetnings algoritmen är inbyggd i styrsystemet |
|
Testning och optimering |
|
|
Genomföra systemprovningar |
Systemets prestanda testas i den faktiska arbetsmiljön. |
|
Parameterjustering |
Enligt provningsresultaten, kamerans parametrar, ljuskällan ljusstyrka, algoritmparametrar, etc. |
|
Införsel och underhåll |
|
|
Systemutveckling |
Det testade och optimerade systemet används i ett verkligt tillämpningsscenario. |
|
Underhåll och uppgraderingar |
Upprätthålla systemet regelbundet, lösa eventuella problem och uppgradera programvara och hårdvara vid behov |

 Tillämpningsområde: industriell automatisering, robotnavigering och -styrning, trafikledning, medicinsk bildbehandling, jordbruk och livsmedelssäkerhet, säkerhetsövervakning, detaljhandel och logistik, utbildning och forskning, smarta hem.
Tillämpningsområde: industriell automatisering, robotnavigering och -styrning, trafikledning, medicinsk bildbehandling, jordbruk och livsmedelssäkerhet, säkerhetsövervakning, detaljhandel och logistik, utbildning och forskning, smarta hem.
 Kort introduktion:
Kort introduktion:
Det är viktigt att man ser till att de anpassningslösningar som finns inom maskinvision kan utformas och genomföras enligt de specifika tillämpningsbehoven.