สายพานไม่หยุดทำงาน ระบุทิศทางหัวและหางปลาแบบพลวัต รวมถึงทิศทางหลังปลา
แบ่งปัน
หนึ่ง. หลังพื้นที่โครงการ:
คำอธิบายความต้องการ:
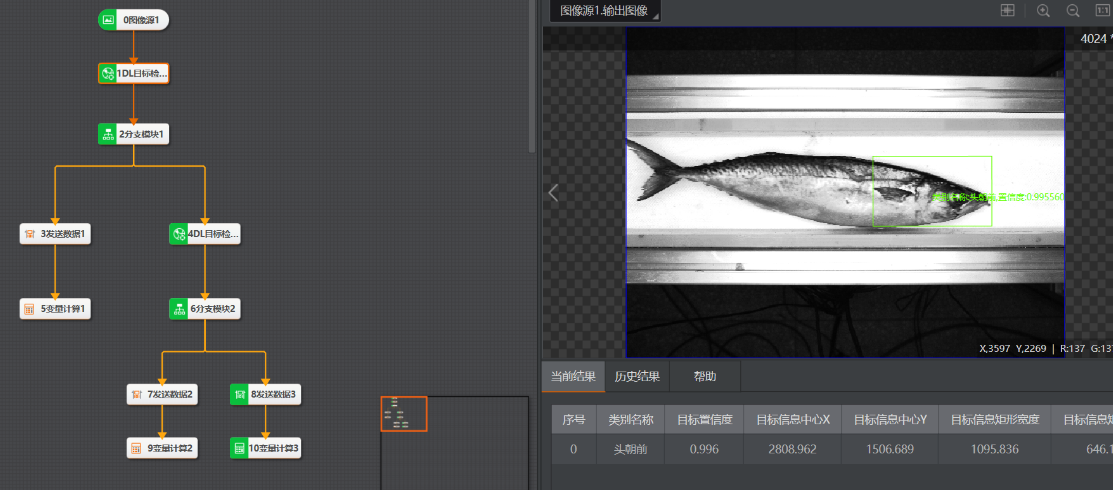
1. เข็มขัดลำเลียงไม่หยุด การระบุทิศทางหัวและหางปลาแบบไดนามิก ทิศทางด้านหลังของปลา
2. จัดหมวดหมู่วัตถุและเลือกว่าจะทิ้งหรือไม่
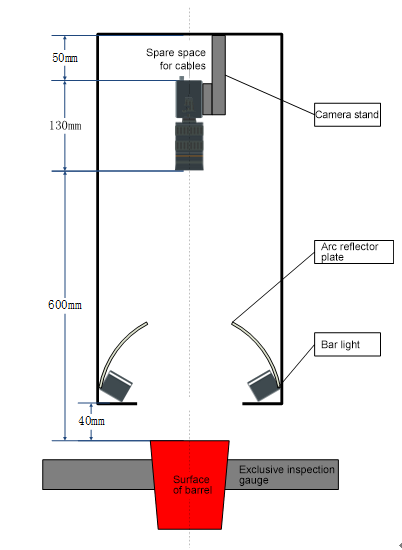
3. เข็มขัดลำเลียง + การประมวลผลกลไกเซนเซอร์โฟโตอิเล็กทริก
ปัญหาและความท้าทายของโครงการและการแก้ไข:
จำนวนภาพมาก การฝึกอบรมเชิงลึกจำนวนมาก
สอง. สถาปัตยกรรมของโซลูชัน:
สาม. ข้อได้เปรียบของโปรแกรม:
1. ซอฟต์แวร์และฮาร์ดแวร์ถูกขายพร้อมกัน (VisionMaster + VisionTrain)。
2. หลังจากใช้งานไป 1 เดือน VM จะถูกนำไปใช้อย่างรวดเร็ว。
3. ความแม่นยำของผลลัพธ์คือ 97% และความพึงพอใจของลูกค้าสูงมาก.