หน้าแรก > โซลูชัน > 3C อิเล็กทรอนิกส์ > สี่กล้องมือถือรองจอกรอบตําแหน่ง
สี่กล้องมือถือรองจอกรอบตําแหน่ง
ใช้แพลตฟอร์มพัฒนาอัลการิทึม VM รับจุดกลางของจอรองและกรอบกลางของมือถือ และเสร็จการติดตั้ง

1). หลังจากการโครงการ:
คำอธิบายความต้องการ:
ส่งจุดศูนย์กลางของหน้าจอรองและกรอบกลางไปยัง PLC และปลายทางของ PLC จะคำนวณและนำกลไกไปแก้ไขท่าทีของหน้าจอรองตามท่าทีของกรอบกลางเพื่อให้การติดตั้งหน้าจอรองและกรอบกลางสมบูรณ์ แก้ปัญหาที่ขอบของกรอบที่ถูกสกัดในแผนเดิมไม่เสถียร และจุดศูนย์กลางของกรอบที่คำนวณได้มีความเอนเอียง ส่งผลให้เกิดสถานการณ์ที่กรอบกดหน้าจอรองและการติดตั้งไม่แม่นยำ
2). สถาปัตยกรรมของโซลูชัน:
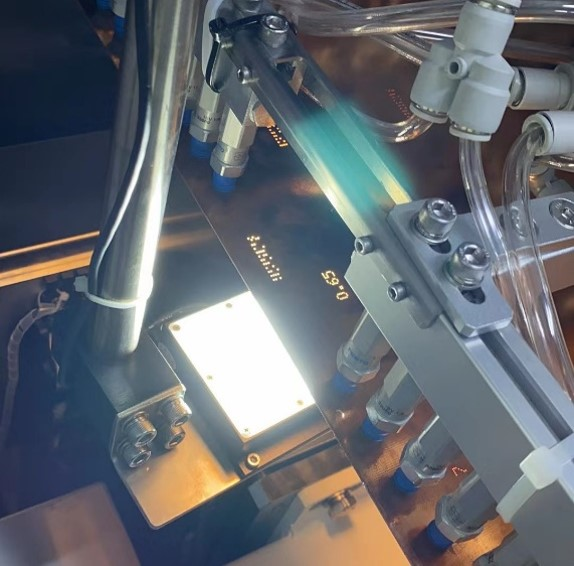
แผนนี้ประกอบด้วยกล้องอุตสาหกรรมความละเอียด 12MP และแพลตฟอร์มพัฒนาอัลกอริธึม VM
ภาพโครงสร้างดังนี้:
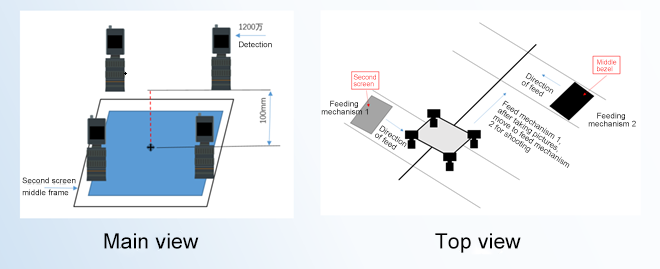
คำอธิบายการทำงานของแต่ละกล้อง:
กล้องหลัก: PLC ส่งคำสั่งเพื่อควบคุมสาขาในการตรวจจับมุมของกรอบกลางหรือตรวจจับมุมของหน้าจอรอง และส่งออกมุมที่ตรวจพบพร้อมสัญญาณว่าการตรวจจับเสร็จสมบูรณ์หรือไม่
กล้องรอง: เหมือนกับระบบการทำงานของกล้องหลัก โดยเพิ่มการแมปกล้องและการคำนวณทางกายภาพ
3). ข้อดีของโปรแกรม:
1. แพลตฟอร์มพัฒนาอัลกอริทึม VM ใช้การลากแล้ววางโมดูลเพื่อสร้างรูปแบบแผน การทำงานในแต่ละขั้นตอนมองเห็นได้ชัดเจน สะดวกสำหรับวิศวกรในการแก้ไขพารามิเตอร์และปรับแต่งผลลัพธ์
2. ช่วยให้ลูกค้าตรวจจับขอบของเฟรมกลางได้อย่างเสถียร ทำให้จุดศูนย์กลางของเฟรมกลางที่คำนวณได้มีเสถียรภาพ ส่งผลให้การจัดเรียงหน้าจอเฟรมกลางมีเสถียรภาพมากขึ้นและเพิ่มประสิทธิภาพของผลิตภัณฑ์