หน้าแรก > โซลูชัน > 3C อิเล็กทรอนิกส์ > อาการสั่นสะเทือนของแผ่นกระจก 360 องศา
วัสดุถูกกระจายผ่านแผ่นสั่นและวัสดุที่ตอบสนองความต้องการถูกกรองโดยสายตาแรก, และแล้ววางทางมองเห็น
แบ่งปัน
1). หลังจากการโครงการ:
คำอธิบายความต้องการ:
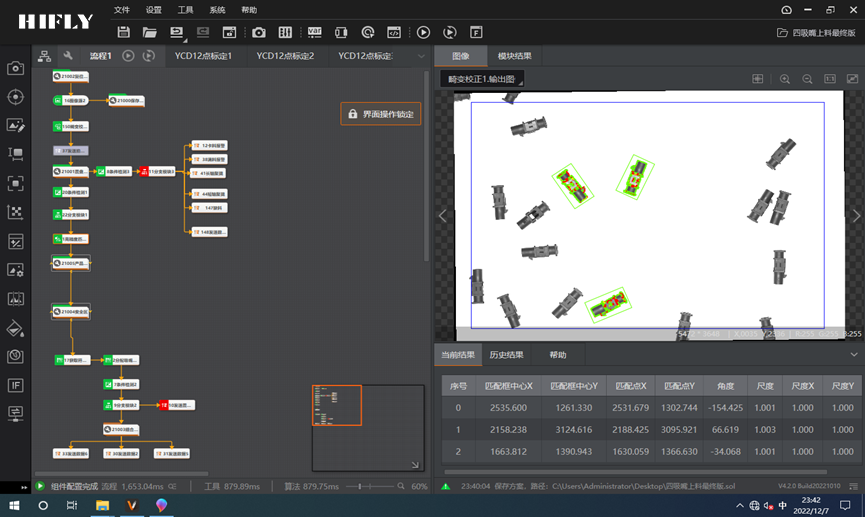
โครงการใช้แพลตฟอร์มพัฒนาอัลกอริทึม VM เพื่อทำการโหลดและหยิบวัสดุหลากหลายชนิด วัสดุจะถูกกระจายผ่านจานสั่น และวัสดุที่ตรงตามข้อกำหนดจะถูกคัดเลือกโดยระบบวิสัยทัศน์ก่อน จากนั้นจึงทำการระบุตำแหน่งด้วยระบบวิสัยทัศน์ อุปสรรคของโครงการคือการทำอย่างไรให้เพิ่มความแม่นยำของการคว้าในมุม 360 องศาสำหรับชิ้นส่วนพิเศษที่เข้ากันได้
ข้อกำหนดทางเทคนิค:
(1) ให้บรรลุการดูดซับผลิตภัณฑ์จากจานสั่น โดยมีความแม่นยำในการวางตำแหน่ง ±0.25 มม.
(2) พิจารณาทิศทางของวัสดุและแยกแยะทิศทางซ้ายและขวา
(3) จำเป็นต้องคัดเลือกวัสดุในทิศทางบนและล่าง ไม่สามารถหยิบเมื่อไม่หงายด้านบน
(4) ฟังก์ชันเขตปลอดภัยจำเป็นต้องคัดเลือกวัสดุที่ใกล้จานสั่น
(5) จำเป็นต้องคัดแยกวัสดุที่ผสมกัน ไม่สามารถหยิบเมื่อไม่ใช่วัสดุเดียวกัน
2). สถาปัตยกรรมของโซลูชัน:
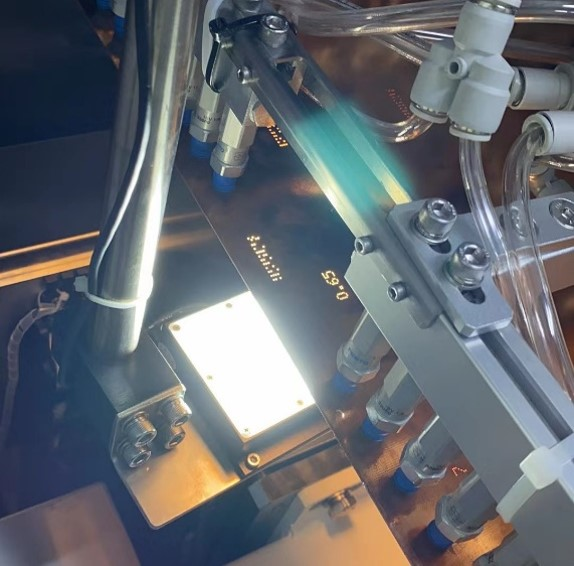
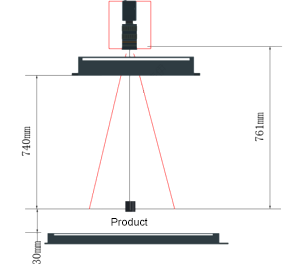
แผนการใช้แสงจากด้านหน้าและด้านหลัง พิมพ์เส้นรอบของวัสดุ และจับคู่เลนส์ FA เพื่อตอบสนองความต้องการของระยะการทำงานที่ยาวและลึกชัดเจน
3). ข้อดีของโปรแกรม:
1. สามารถทำให้เกิดฟังก์ชันป้อนอัตโนมัติสำหรับชิ้นส่วนที่มีรูปร่างได้ อัตราการพลาดในการจับน้อยกว่า 0.1%
2. การประมวลผลประสิทธิภาพของอัลกอริธึมภาพ VM มีประสิทธิภาพดี ทำงานร่วมกับหุ่นยนต์ความเร็วสูงของลูกค้าเพื่อนำวัสดุ สามารถรองรับความต้องการของการป้อนด้วยความเร็วสูงถึง 7200 ชิ้น/ชั่วโมง
3. พัฒนาซอฟต์แวร์มาตรฐานบนแพลตฟอร์มอัลกอริธึม VM ไม่จำเป็นต้องเขียนโปรแกรมที่ซับซ้อน ไม่จำเป็นต้องมีวิศวกรซอฟต์แวร์ในการสร้างโครงการ ช่วยลดความยากในการพัฒนาและการบำรุงรักษาหลังการขายสำหรับองค์กร