การพิมพ์หน้าจอเป็นกระบวนการสำคัญของการผลิตแบตเตอรี่ การกำหนดตำแหน่งทางทัศนวิสัยเพื่อนำทางการพิมพ์บนแพลตฟอร์ม UVW และการตรวจสอบข้อบกพร่องอีกครั้งหลังจากการพิมพ์
แบ่งปัน
1). หลังจากการโครงการ:
คำอธิบายความต้องการ:
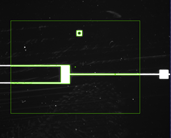
ข้อกำหนดการวางตำแหน่ง: ถ่ายภาพมุมสี่หรือจุดทำเครื่องหมายของแผ่นซิลิกอน ระบุตำแหน่งการพิมพ์ และนำทางการพิมพ์บนแพลตฟอร์ม UVW;
ข้อกำหนดการตรวจจับ:
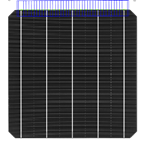
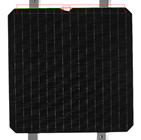
1. การตรวจสอบความเสียหายที่ขอบของแบตเตอรี่;
2. ตรวจจับสิ่งสกปรกบนแบตเตอรี่ เช่น ฝุ่น ลายนิ้วมือ เป็นต้น;
3. ตรวจสอบซ้ำว่าแบตเตอรี่ที่พิมพ์แล้วมีรอยร้าวหรือแตกหรือไม่
ข้อกำหนดทางเทคนิค:
ความแม่นยำแบบสถิตประมาณ ± 0.005 มม. ความแม่นยำแบบไดนามิกประมาณ ± 0.015 มม.
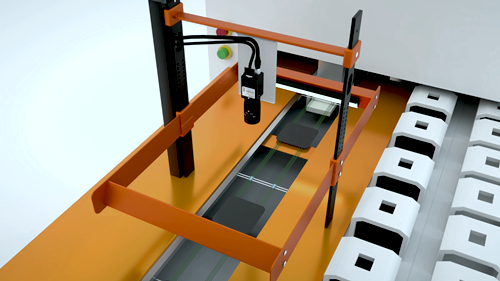
2). สถาปัตยกรรมของโซลูชัน:
ระบบวิชั่นสำหรับการวางตำแหน่งประกอบด้วยกล้องอุตสาหกรรมความละเอียด 5MP เลนส์อุตสาหกรรมซีรีส์ HF และแหล่งกำเนิดแสงวงแหวน
กล้องอุตสาหกรรมแบบไลน์สแกนความละเอียด 2K เลนส์ KF และแหล่งกำเนิดแสงไลน์ ประกอบเป็นระบบวิชั่นสำหรับการตรวจสอบ
3). ข้อดีของโปรแกรม:
1. ความแม่นยำสูง ผ่านการสอบเทียบด้วยกระดานหมากฮอสีดำและขาว แก้ไขความโค้งเว้าเชิงรัศมีและความโค้งเว้าจากมุมมอง
2. ใช้พลังงานต่ำ เวลากระบวนการวางตำแหน่ง ≤150ms เวลากระบวนการตรวจสอบขอบ ≤200ms
3. พัฒนาบนแพลตฟอร์ม VM พร้อมด้วยโมดูลอัลกอริทึมประสิทธิภาพสูงมากมาย อัลกอริทึมการกำหนดตำแหน่งโดยใช้วิธีการจับคู่คุณลักษณะ และอัลกอริทึมตรวจจับข้อบกพร่องขอบด้วยเครื่องมือตรวจจับข้อบกพร่องเชิงเส้น
4. โซลูชันกล้องที่คุ้มค่า ต้นทุนต่ำ แต่ประสิทธิภาพสูง