
Chiếc xe tải sẽ vận chuyển pallet đầy vật liệu đến khu vực dỡ hàng, và sau khi dỡ bằng xe nâng, nó sẽ được vận chuyển trực tiếp đến trạm thao tác 3D để phân loại và tháo chồng. Sau khi hoàn thành, AGV sẽ được sử dụng để hợp tác với việc vận chuyển đến trạm làm việc tương ứng.
Chia sẻ
1) Hậu quả dự án:
Nhu cầu của khách hàng:
Xác định và tháo rời các thùng chứa có kích thước khác nhau.
Điểm đau của khách hàng:
1. kích thước khác nhau của hộp nhận dạng hỗn hợp, theo vị trí và kích thước của hộp đầu ra tương ứng hướng nắm bắt.
2. Sự phơi nhiễm thay đổi theo thời gian thực từ sáng đến tối (mặt trời hoặc mây), và tốc độ nhận dạng sản phẩm và sự ổn định của hệ thống cần được cải thiện.
2) Kiến trúc giải pháp:
Quá trình tổng thể:

Các mô-đun quy trình chính:
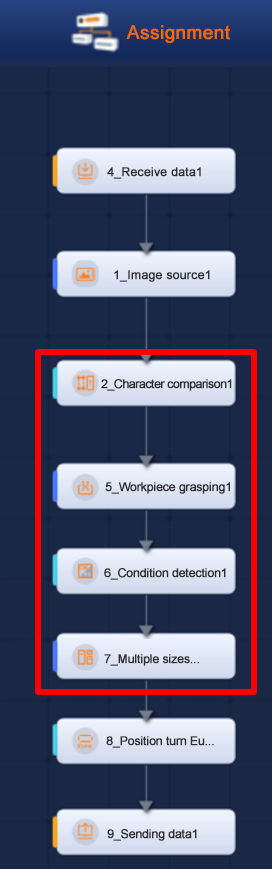
So sánh ký tự: Đặt lệnh khớp tương ứng, được sử dụng để kích hoạt hợp lý phát hiện mô-đun tiếp theo.
Chụp lấy mảnh: Kéo khu vực của hình ảnh RGB nơi mà mảnh được lấy, với phạm vi lựa chọn hộp vượt ra ngoài cạnh bên ngoài của khung thực tế.
Khám phá tình trạng: Xác định xem sản phẩm có được nhận ra hay không và gửi tín hiệu logic OK / NG tương ứng đến máy tính chủ.
Hộp đa kích thước: cấu hình các thông số liên quan của loại hộp palletizing có nhiều kích thước và thực hiện nhiệm vụ không palletizing, sử dụng ví dụ để phân đoạn mô hình thuật toán, thu thập hình ảnh của nhiều vị trí đặt sản phẩm cho đào tạo mô hình.
2) Ưu điểm của chương trình:
1. Dưới tiền đề thay đổi phơi sáng lớn, hình ảnh có thể rõ ràng và nhận dạng ổn định, và thời gian từ tín hiệu nhận đến dữ liệu đầu ra là 3,5 giây.
2. cho một loạt các kích thước, màu sắc của hộp vật liệu để đạt được tỷ lệ nhận dạng 100%.
3. để đạt được sản xuất không bị gián đoạn 24/7, hiệu quả công suất tăng 100%.
4. một trạm 3D-RGBD cơ khí có thể thay thế 5 nhân lực.









