
سيقوم الشاحنة بنقل europallet مليء بالمواد إلى منطقة التفريغ، وبعد التفريغ بواسطة شاحنات رفع forklift، سيتم نقلها مباشرة إلى محطة الروبوت 3D لفرزها وتفكيكها. وبعد الانتهاء، سيتم استخدام AGV للتعاون في النقل إلى المحطة العاملة المقابلة.
شارك
1). خلفية المشروع:
طلب العميل:
تحديد وتفكيك صناديق بأحجام مختلفة.
نقاط ألم العميل:
1. التعرف المختلط على أحجام الصندوق، مع إخراج الاتجاه المناسب للإمساك بناءً على الموقع والحجم.
2. تتغير الإضاءة في الوقت الفعلي من صباحًا إلى مساءً (مشمس أو غائم)، ويحتاج معدل التعرف على المنتج واستقرار النظام إلى تحسين.
2). هيكل الحل:
العملية العامة:

وحدات العمليات الرئيسية:
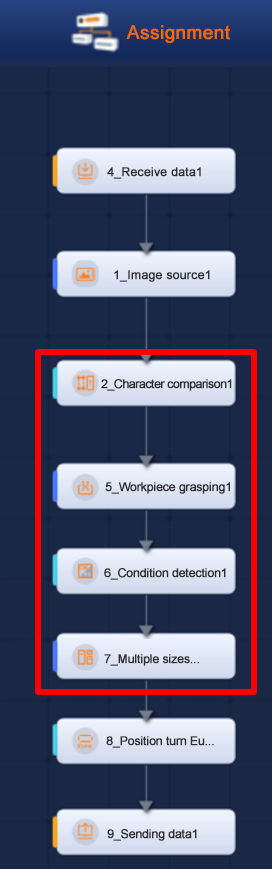
مقارنة الشخصيات: ضبط الأمر المطابق المقابل، الذي يستخدم لتفعيل منطقي لاحق للكشف عن الوحدة اللاحقة.
إمساك قطعة العمل: رسم منطقة صورة RGB حيث سيتم إمساك قطعة العمل، مع نطاق تحديد المربع يتجاوز الحافة الخارجية للإطار الفعلي.
كشف الشرط: تحديد ما إذا كان المنتج معترفًا به، وإرسال إشارات منطقية متوافقة OK/NG إلى الكمبيوتر الرئيسي.
صندوق متعدد الأحجام: تكوين المعلمات ذات الصلة لنوع تجميع الصناديق بحجم مختلف وتنفيذ مهمة فك التجميع، باستخدام المثال لتقسيم نموذج الخوارزمية، وجمع صور لمواقع وضع منتجات مختلفة لأغراض تدريب النموذج.
2). مزايا البرنامج:
1. تحت شرط تغير التعرض الكبير، يمكن أن تكون الصورة واضحة والاستقرار في التعرف، والوقت من استلام الإشارة إلى إخراج البيانات هو 3.5 ثانية.
2. بالنسبة لأنواع مختلفة من أحجام وألوان صندوق المواد لتحقيق معدل التعرف بنسبة 100%.
3. للوصول إلى إنتاج مستمر على مدار 24/7، زادت كفاءة السعة بنسبة 100%.
4. يمكن لمحطة يدوية ميكانيكية 3D-RGBD أن تحل محل 5 عمالة.









