
Náklaďák dopraví paletu plnou materiálů do oblasti vykládky, kde bude po vyklizení forkliftkou přenesena přímo na stanici 3D manipulátoru pro třídění a rozbalení. Po dokončení bude použita AGV pro spolupráci při dopravě na příslušnou pracovní stanici.
Sdílet
1). Pozadí projektu:
Požadavky zákazníka:
Identifikujte a demontujte kontejnery různých velikostí.
Bolesti zákazníka:
1. Rozlišení různých velikostí krabic, podle polohy a velikosti krabice vypište odpovídající směr chytání.
2. Vystavení se mění od rána do večera (po slunečném nebo po oblačném počasí) a je třeba zvýšit přesnost rozpoznávání produktu a stabilitu systému.
2). Architektura řešení:
Celkový proces:

Klíčové moduly procesu:
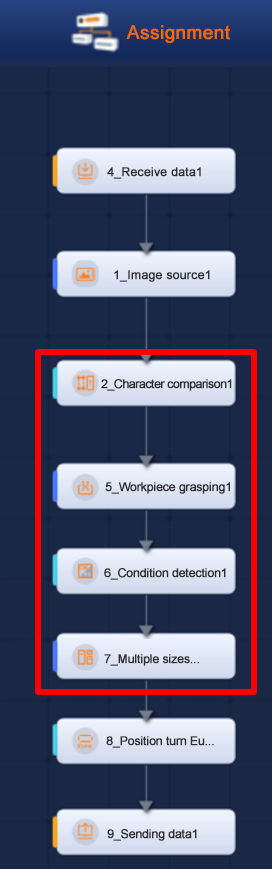
Porovnání znaků: Nastavte odpovídající příkaz pro shodu, který se používá k logickému vyvolání detekce následujícího modulu.
Vytýkání dílu: Nakreslete oblast RGB obrázku, kde má být díl sebrán, s rozsahem výběru rámečku přesahujícím vnější hranici skutečného rámce.
Detekce stavu: Určete, zda je produkt rozpoznán, a pošlete odpovídající logické signály OK/NG na hlavní počítač.
Vícesložková krabice: nakonfigurujte relevantní parametry typu paletizace krabic různých velikostí a provedte úkol depaletizace, použijte příklad ke segmentaci algoritmického modelu a sbírejte snímky různých poloh umístění produktů pro trénování modelu.
2). Výhody programu:
1. Za předpokladu velkých změn expozice může být obrázek čistý a rozpoznávání stabilní, a čas od přijetí signálu do výstupních dat je 3,5s.
2. pro materiálové krabice různých velikostí a barev dosahuje 100% úspěšnosti rozpoznávání.
3. umožňuje 24/7 neustálou produkci, kapacitní efektivita se zvýší o 100%.
4. stanice manuálního zařízení 3D-RGBD může nahradit 5 pracovních sil.









