Página de inicio > Soluciones > Semiconductores/circuitos integrados
En la parte de inspección de calidad de este proyecto, se mide el voltaje utilizando dos sonda que perforan cada extremo de las uniones de soldadura respectivamente, con el fin de determinar si las uniones en la placa PCB están bien conectadas y eliminar los productos defectuosos.
Compartir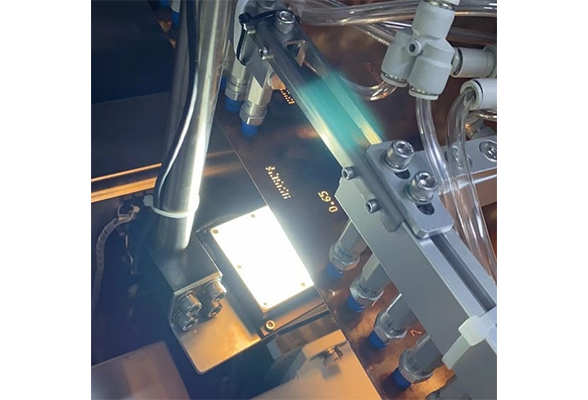
1). Antecedentes del proyecto:
Descripción del requisito:
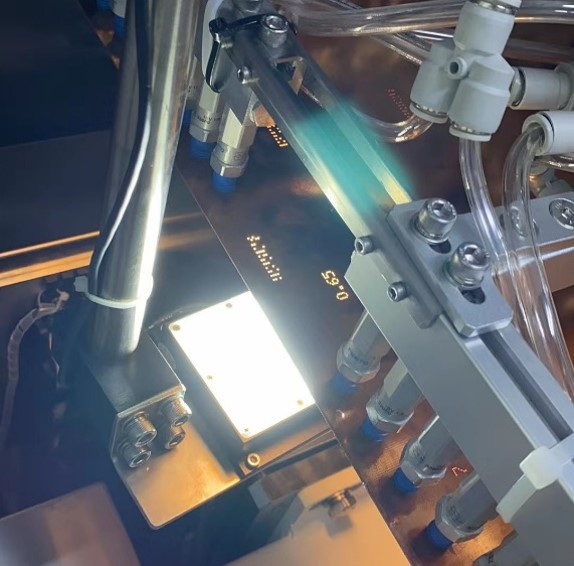
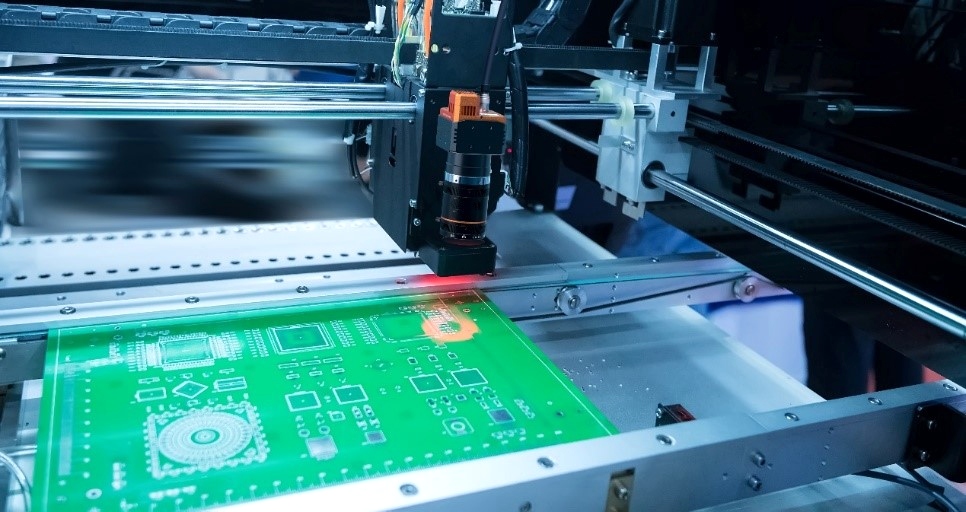
Primero, la placa PCB es fotografiada por la cámara superior, y se proporcionan las coordenadas de las juntas de soldadura que necesitan ser medidas para una posición aproximada. Luego, los dos manipuladores llevan un sonda a las coordenadas correspondientes para fotografiar la junta de soldadura, realizar el posicionamiento preciso y luego tocar juntas la junta de soldadura para medir el voltaje y determinar si la junta de soldadura está en buen estado.
Puntos dolorosos y problemas:
1.Utilizando el esquema tradicional, el conjunto completo de cámara, lente, fuente de luz, controlador de fuente de luz y otros costos son más altos.
2.El esquema tradicional tiene un proceso complicado, altos requisitos para el personal de depuración en el lugar y altos costos de mano de obra.
3.La solución tradicional tiene un período de depuración largo y no puede ser lanzada rápidamente.
2). Arquitectura de la solución:
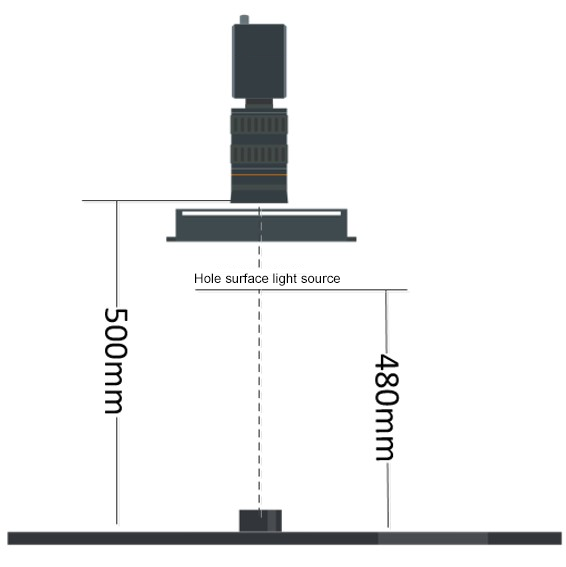
Diagrama de erección:
Proceso de depuración:
1. El manipulador lleva la hoja de calibración y mantiene la misma altura con la placa PCB. Toma fotos con la cámara, construye el proceso con VM, recibe las coordenadas físicas del manipulador a través del protocolo de comunicación TCP y realiza la calibración automática en nueve puntos.
2. El brazo robótico lleva una cámara inteligente para fotografiar la placa de calibración, realizar estampado de puntos y generar archivos de calibración a través de las imágenes y coordenadas físicas de nueve puntos.
3. La posición de la placa PCB se envía al brazo robótico, y el brazo robótico lleva la cámara inteligente a la posición correspondiente para fotografiar la junta de soldadura.
4. La cámara inteligente utiliza la búsqueda por puntos para encuadrar cada posición de la junta de soldadura en orden, calibra las coordenadas y las convierte para lograr la clasificación.
5. Después de hacer la diferencia entre la posición de la foto de calibración de la cámara inteligente y la posición de la foto de producción, se añade el valor de conversión de calibración de la junta de soldadura para obtener la posición real de cada junta de soldadura.
3). Ventajas del programa:
1. Usa una cámara superior para tomar fotos de las coordenadas de los manipuladores de ambos lados directamente, y después de tomar las fotos, los dos manipuladores llegan al punto objetivo tras la calibración y transformación, sin necesidad de ir uno tras otro, lo que ahorra considerablemente el tiempo de movimiento del manipulador. Todo el proceso se ha reducido de 15 segundos a aproximadamente 5 segundos.
2. Al reducir la caja rectangular de búsqueda de la junta de soldadura y posicionar cada junta de soldadura individualmente, se puede lograr una buena localización de la posición de la junta de soldadura. Los clientes requieren una precisión de 0,1 mm, y la precisión actual alcanza los 0,05 mm, cumpliendo así con las necesidades del cliente.
3. este proyecto es un proyecto clásico en el que se utilizan juntas cámaras inteligentes e industriales. En proyectos reales, se puede seleccionar el tipo adecuado de cámara según las necesidades específicas, e incluso usar ambas juntas para adaptarse al entorno del cliente y lograr el efecto correspondiente.
4. El plan original del cliente consistía en enviar coordenadas a la posición correspondiente de la cámara superior después de tomar la primera foto, y enviar coordenadas para la segunda foto después de tomarla. El plan actual solo requiere tomar una foto y llamar a diferentes archivos de calibración para controlar simultáneamente el brazo robótico 1 y 2, aumentando la eficiencia general en un 20%.