1). Antecedentes del proyecto:
Descripción del requisito:
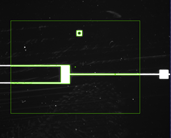
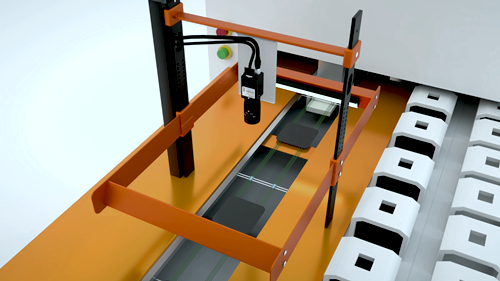
Requisitos de posicionamiento: Fotografiar las cuatro esquinas o puntos de referencia de la wafer de silicio, localizar la posición de impresión y guiar la impresión en la plataforma UVW;
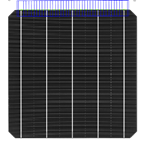
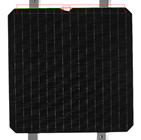
Requisitos de detección:
1.detección de daños en el borde de la batería;
2.detectar la suciedad en la batería, como ceniza, huellas dactilares, etc.;
3.Revisar nuevamente si la batería impresa está agrietada o rota.
Requisitos técnicos:
La precisión estática es de aproximadamente ± 0.005mm, la precisión dinámica es de aproximadamente ± 0.015mm.
2). Arquitectura de la solución:
El sistema de visión de posicionamiento consta de una cámara industrial de resolución de 5MP, lente industrial de la serie HF y fuente de luz anular.
Cámara industrial de escaneo de línea 2K, lente KF y fuente de luz de línea constituyen el sistema de visión de inspección.
3). Ventajas del programa:
1. alta precisión, a través de la calibración con tablero de ajedrez en blanco y negro, corrección de distorsión radial y distorsión perspectiva.
2. bajo consumo, tiempo del proceso de posicionamiento ≤150ms, tiempo del proceso de detección de bordes ≤200ms.
3. Basado en la plataforma VM, con una amplia gama de módulos algorítmicos de alto rendimiento, algoritmo de posicionamiento basado en emparejamiento de características, algoritmo de detección de defectos de borde basado en herramientas de detección de defectos lineales.
4. solución de cámara costo-efectiva, bajo costo, alto rendimiento.