
A teherautó aanyagok teljes palettáját szállítja a kibocsátási területre, a forkaszállító által történő kibocsátás után közvetlenül a 3D manipulátorszigetig továbbítják a rendezéshez és a lehalmozáshoz. Befejezés után AGV-t használnak a munkaállomások közötti szállításhoz.
Megosztás
1). Projekt háttére:
Ügyfél igénye:
Különböző méretű tárolók azonosítása és bontása.
Ügyfélmegoldások:
1. Különböző méretű dobozok keveredése, amely alapján a doboz helyzetéhez és méretéhez megfelelően adjuk meg a rázandó irányt.
2. Az expozíció reggel estig (napos vagy felhős) valós idejű változása, és a termék felismerési aránya illetve a rendszer stabilitása javítása szükséges.
2). Megoldás architektúrája:
Általános folyamat:

Fontos folyamatmodulok:
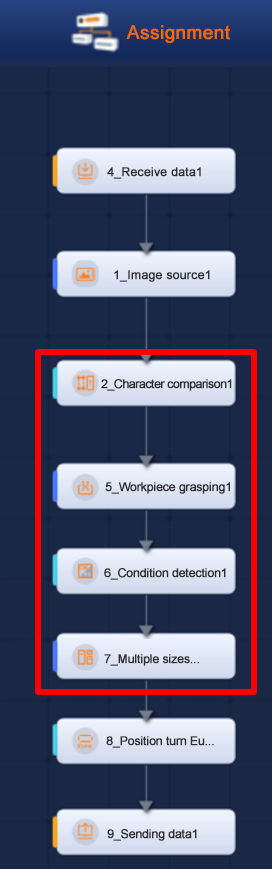
Karakter összehasonlítás: Állítsa be a megfelelő egyeztetési parancsot, amelyet logikai kiváltáshoz használnak a következő modul detektálásához.
Munkatétel elfogása: Rajzolja ki az RGB képen azt a területet, ahol a munkatételt el kell fogadni, a doboz kijelölésének határának túlmenete a valós keret külső szélén túl.
Feltétel észlelése: Meghatározni, hogy a termék felismerhető-e, és küldjön megfelelő OK/NG logikai jeleket a főgépnek.
Több méretű doboz: konfigurálja a dobozpalettázási típus relevens paramétereit többféle méretben, és hajtsa végre a depalettázási feladatokat, példát segítségével szegmentálja az algoritmus modelljét, gyűjtse össze a termék helyezkedésének különböző pozícióinak képeit a modell betanítására.
2). Program előnyei:
1. Nagy expozíciós változások esetén is tiszta lehet a kép, és stabil marad az ismertetés, az adatszignál fogadásától az adatkimenetre 3,5 másodpercig.
2. Többféle méretű és színű anyadosztályokra 100%-os felismerési arányt ér el.
3. hogy 24/7 folytonos termelést érjünk el, a kapacitás hatékonysága 100%-kal növekedett.
4. egy 3D-RGBD mechanikus kézi munkaállomás helyettesítheti 5 ember munkáját.









