Laman Utama > Penyelesaian > Semikonduktor/Sirkuit Bersepadu
Dalam bahagian pemeriksaan kualiti projek ini, voltan diukur dengan menggunakan dua sonda untuk menusuk kedua-dua hujung titik penyolderan masing-masing, untuk menilai sama ada titik penyolderan pada papan PCB berhubung baik dan mengeluarkan produk yang bermasalah.
Kongsikan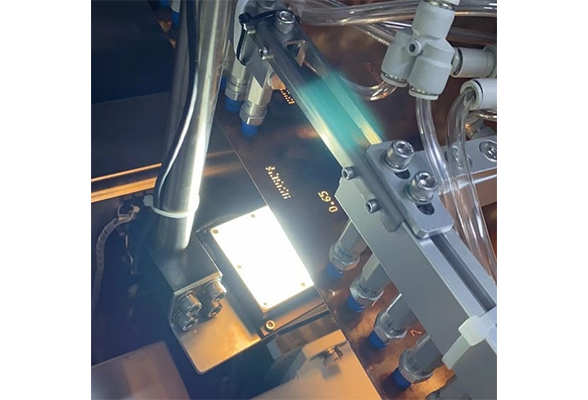
1). Latar belakang projek:
Keterangan keperluan:
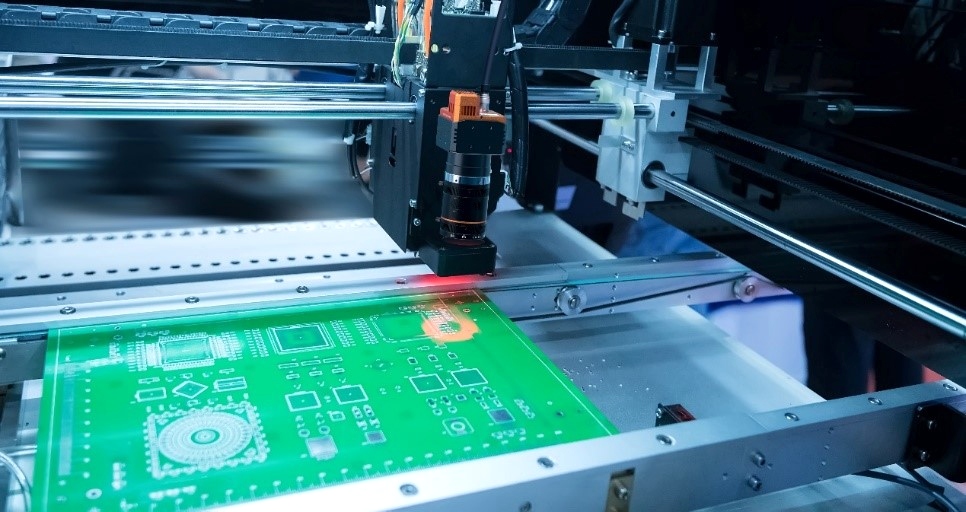
Pertama, papan PCB difoto oleh kamera atas, dan koordinat titik penyolderan yang perlu diukur diberikan untuk pemosisian kasar. Kemudian dua manipulator masing-masing membawa probe ke koordinat yang sesuai untuk memfoto titik penyolderan, melakukan pemosisian tepat, dan kemudian menusuk titik penyolderan bersama-sama untuk mengukur voltan dan menentukan sama ada titik penyolderan itu baik atau tidak.
Masalah dan titik kesakitan:
1.Menggunakan skema tradisional, keseluruhan set kamera, lensa, sumber cahaya, pengawal sumber cahaya dan lain-lain mempunyai kos yang lebih tinggi.
2.Skema tradisional mempunyai proses yang rumit, permintaan tinggi terhadap kakitangan penyelaras di tempat, dan kos tenaga kerja yang tinggi.
3.Penyelesaian tradisional mempunyai tempoh penyelarasan yang panjang dan tidak dapat dilancarkan dengan pantas.
2). Arkitekture penyelesaian:
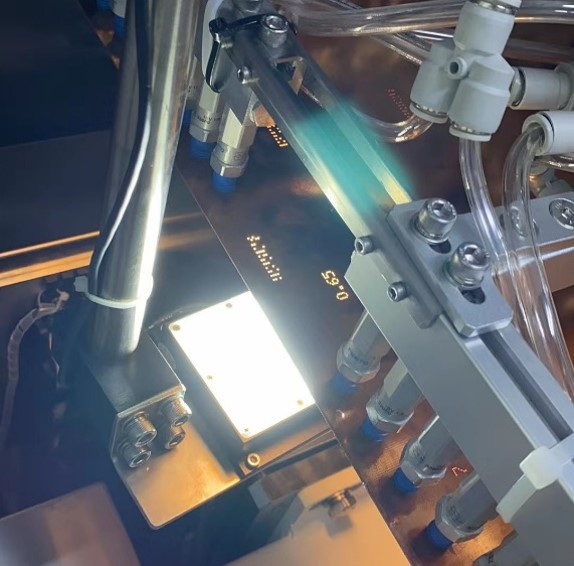
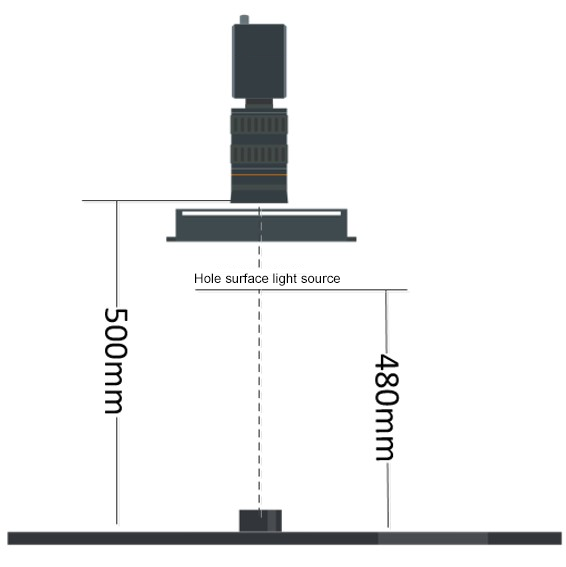
Rajah ereksi:
Proses penyelarasan:
1. Penyelaras membawa kertas kalibrasi dan mengekalkan ketinggian yang sama dengan papan PCB. Ambil gambar dengan kamera, bina proses dengan VM, terima koordinat fizikal penyelaras melalui protokol komunikasi TCP, dan laksanakan penyesuaian automatik sembilan titik.
2. Lengan robot membawa kamera pintar untuk memotong papan kalibrasi, melaksanakan cap titik, dan menghasilkan fail kalibrasi melalui imej dan koordinat fizikal sembilan titik.
3. Posisi papan PCB dihantar kepada lengan robot, dan lengan robot membawa kamera pintar ke kedudukan yang sepadan untuk memotretnya pada sambungan las.
4. Kamera pintar menggunakan carian titik untuk membekalkan setiap kedudukan sambungan las secara berperingkat, menyelaraskan koordinat dan menukar mereka untuk mencapai pengaturusan.
5. Selepas membuat perbezaan antara kedudukan foto kalibrasi kamera pintar dan kedudukan foto pengeluaran, tambahkan nilai penukaran kalibrasi sambungan las untuk mendapatkan kedudukan sebenar setiap sambungan las.
3). Kelebihan program:
1. Gunakan kamera atas untuk mengambil gambar koordinat manipulator di kedua sisi secara langsung, dan kedua manipulator mencapai titik sasaran setelah pengambilan gambar melalui kalibrasi dan transformasi, tanpa perlu pergi ke sana secara bergiliran, yang sangat menghemat masa pergerakan manipulator. Proses keseluruhan telah berkurang dari 15 saat kepada kira-kira 5 saat.
2. Dengan mengurangkan kotak segi empat tepat carian sambungan timah dan memosisikan setiap sambungan secara individu, ia boleh ditempatkan dengan baik pada lokasi sambungan timah. Pelanggan memerlukan kejituan 0.1mm, dan kejituan semasa ini mencapai 0.05mm untuk memenuhi keperluan pelanggan.
3. projek ini adalah projek klasik menggunakan kamera pintar dan kamera industri bersama-sama. Projek sebenar boleh dipilih mengikut keperluan sebenar, jenis kamera yang sesuai boleh dipilih, malah kedua-duanya boleh digunakan bersama untuk menyesuaikan kepada persekitaran pelanggan, untuk mencapai kesan yang sepadan.
4. Pelan asal pelanggan adalah untuk menghantar koordinat kepada kedudukan kamera atas selepas mengambil gambar pertama, dan menghantar koordinat kepada gambar kedua selepas mengambil gambar kedua. Pelan semasa hanya memerlukan pengambilan gambar sekali dan memanggil fail kalibrasi yang berbeza untuk mengawal lengan robot 1 dan 2 pada masa yang sama, dan kecekapan keseluruhan telah meningkat sebanyak 20%.